Sprint 2
For Sprint 2, our goal was to have a functional robot with a fully integrated system. A fully integrated system for this sprint meant having a robot that has IR sensors to avoid objects and a fully functional leg system that will propel the robot forward.
The first system that we worked on was the mechanical system. During the last sprint we figured out the lateral motion of the legs, but due to mechanically interfering parts, our team could not accurately test the functionality of the legs. In order to improve this, we started by redesigning the legs and mounts. In the previous iteration of our robot, the servos were hot glued to a cardboard box. As a result, the legs were not precisely at the same height. To remedy this problem, we built mounts that would constrain the legs at the same height and that were securely bolted to the chassis. We also lengthened the distance between the ends of the lateral legs and the chassis to prevent leg interference. Before printing the legs and mounts, the mechanical team created a SolidWorks assembly to check for interference.
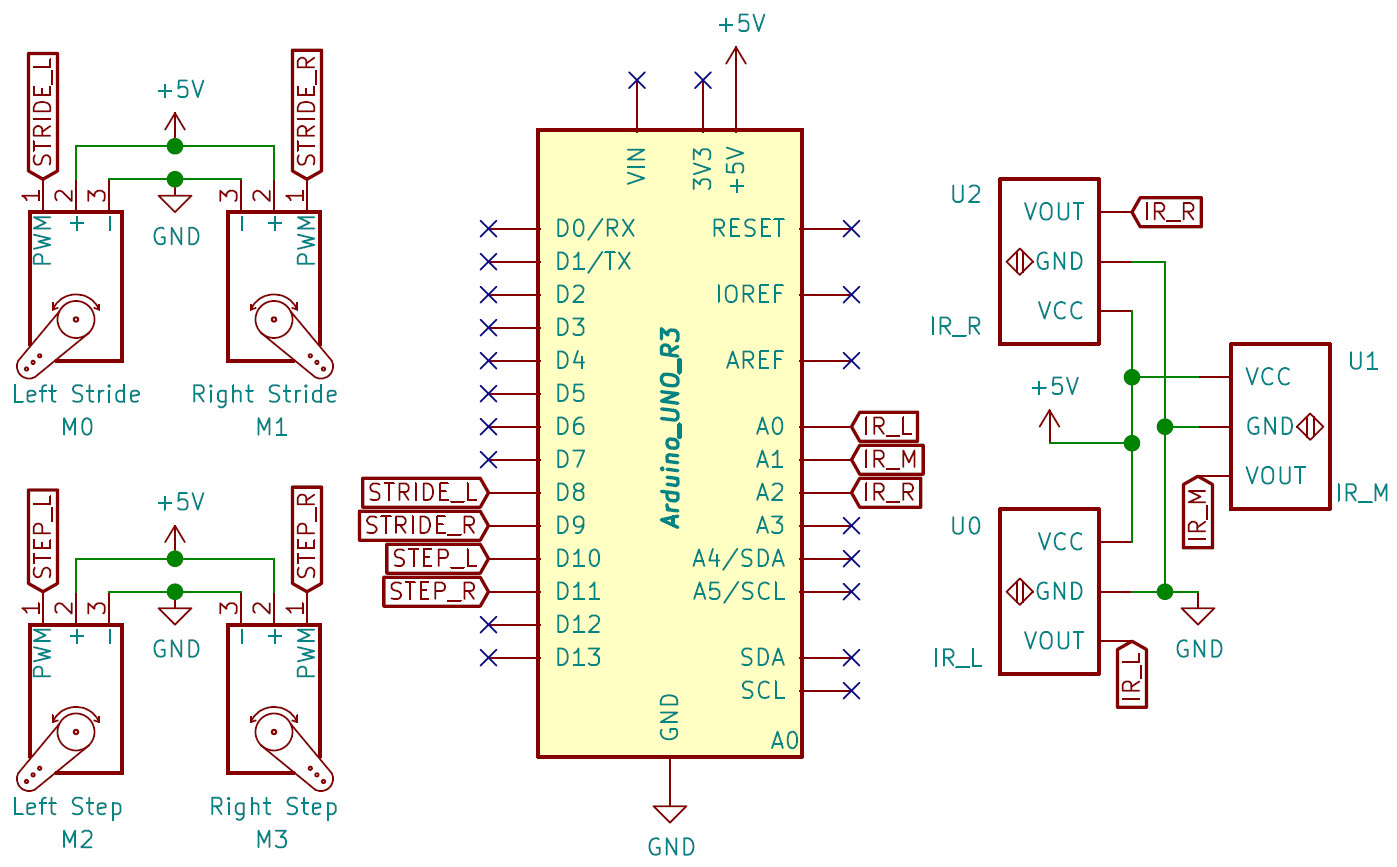
Once everything was printed and assembled, we connected the servos to the Arduino. When the servos were first connected to the Arduino, only the barred, or lateral, legs would move. The mechanical team and software team had to work together to translate the theoretical motion of the legs to code.
After having a successfully walking robot, we shifted our focus to our robot's sensors. During Sprint 1 the software team wrote a script that would convert the unprocessed signal from the Arduino to a heading vector that tells the robot which direction to move. The IR sensors were a way to test the script even though our final robot will not include IR sensors as the main source of heading input. To secure the IR sensors to the chassis, the mechanical team designed and fabricated L-shaped brackets. The sensors bolt into the brackets, and the brackets are glued to the chassis.

We successfully completed all of our goals for Sprint 2. Our robot can functionally walk and avoid objects.
During this sprint we learned about all the components that we need to focus on for Sprint 3. Our goals for Sprint 3 are as follows:
- Upgrade servos on middle legs to have more torque in order to support the additional weight of computing hardware.
- Switch from USB powered to battery powered.
- Redesign chassis to hold breadboard, Arduino, and Raspberry Pi.
- Integrate computer vision with IR sensors and functional legs.
- Redesign legs to help increase the speed of the robot.