Final Code Architecture
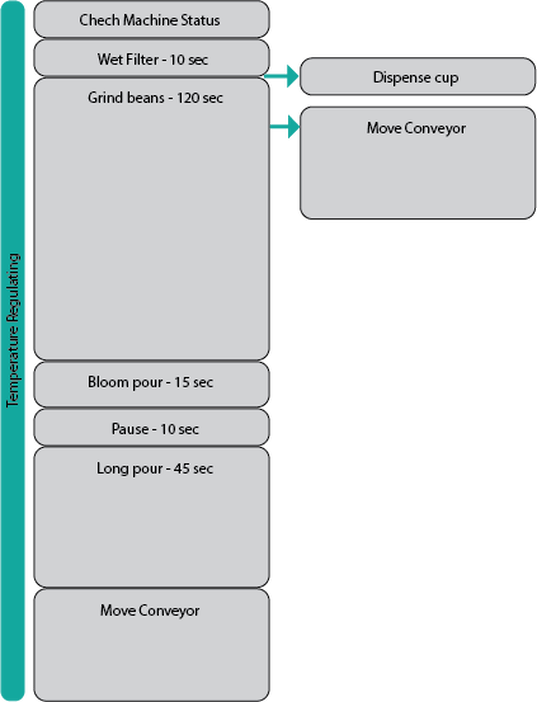
The following is the architecture of our system software. Our program steps through each stage of the brew in the order seen here. The main program is a state machine that keeps track of timing and the status of our robot throughout the brew, calling each subsystem and its associated functions when it’s time. To view our code, visit our team’s GitHub .
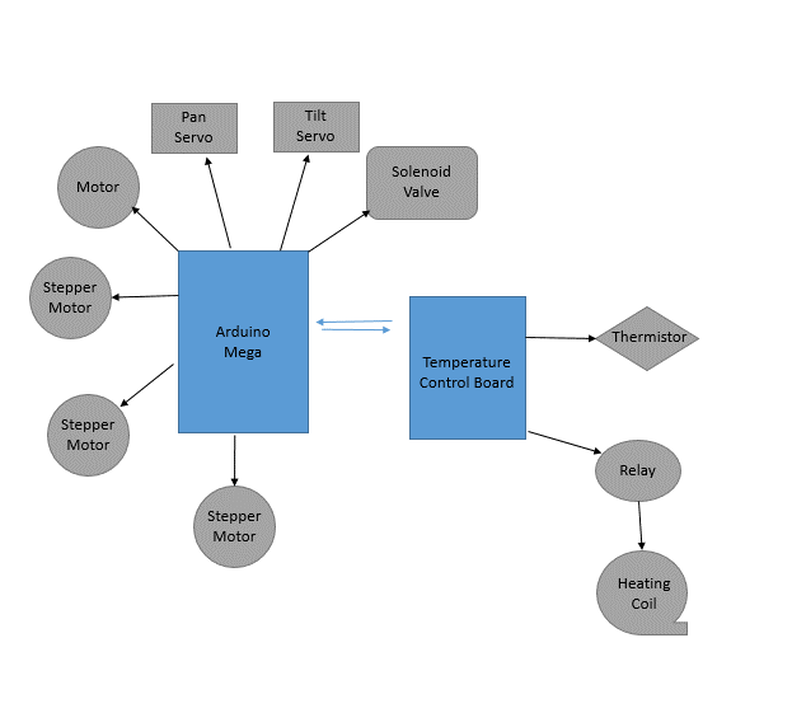
Our main program runs off the Arduino Mega shown centrally below. When it makes function calls to the subsystem, it sends commands out to the rest of the circuits via digital output pins.