An Overview
This project took us approximately 9 weeks and a total of 4 sprints. Each sprint was 2 weeks long and it allowed us to create better iterations of our robot. Here we provided an overview of the first three iterations of Andrew.
Each Sprint description is broken down by a quick overview on the mechanism, what materials it was composed of, a few technical risks, and the amount of money our team used that sprint.
Sprint One
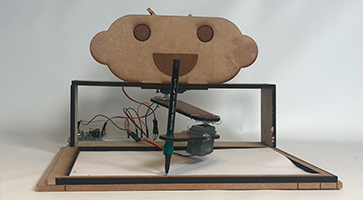
- Overview: This version of Andrew used Servos. The servos were too heavy for the mechanism. Code was not implemented, but there was a lot of research going on backstage.
- Materials used include MDF Hardboard and 2 Servo Motors.
- Technical risks included that the servo motors were too heavy for the arm and code was not really inplemented.
- Total cost: $0
Sprint Two
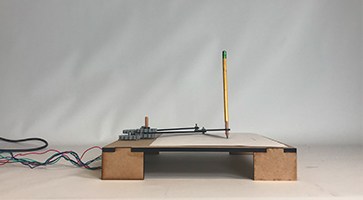
- Overview: We decided to move to a new design that allowed us to address the weight issue. We began to code and to use Stepper Motors.
- Materials used include MDF Hardboard, 2 Stepper Motors, an Acrylic Sheet, and 4 PLA printed Gears.
- Technical risks included that stepper motor shafts were too small and code was not really inplemented.
- Total cost: $76.93
Sprint Three
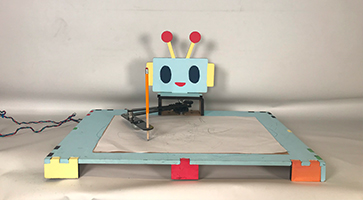
- Overview: This version was a improved version of the last mechanism. We re-introduced the aesthetic aspect of the project and continued improving code.
- Materials used include MDF Hardboard, 2 Stepper Motors, an Acrylic Sheet, 4 PLA printed Gears, and Acrylic Paint.
- Technical risks included not enough clearance and code was not implemented.
- Total cost: $29.57