Our System
This is Andrew. He was designed to draw basic shapes.
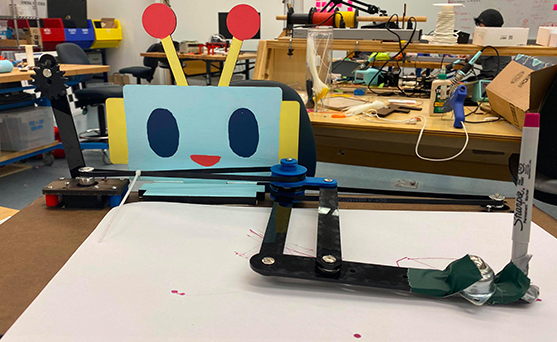
For the final iteration, we switched gears by switching to a belt drive! Our arm is still the four-bar linkage from Sprint two, resized to fit this current iteration. For software, we were focused on troubleshooting existing problems in our software to enable our integration to work smoothly with the changes made in the mechanical system. We reduced backlash from our mechanical system by using the belt drive instead of 3D printed gears.
We knew that in order to make our current iteration work, we’d have to be more realistic in our goals. So instead of aiming for a not-so-great reach goal, we shifted to working for the best MVP we could make in the given time. What that means is that the z-axis and the image vectorizing had to take a back seat. We detail more about what these would’ve looked like in our Next Steps page.
Currently, our robot Andrew can draw simple geometric shapes! While there are still problems to fix with this iteration (for example, our pen ran out of ink and no other pen fits our current design), we now have an MVP we’re proud of.
Bugdet Overview
| Expenses | Comments | Sprint | Price |
| Fiberboard | --- | First | Free |
| Servos | x2 | First | Free |
| Acrylic | 12" x 12" x 1/8" | Second | $7.14 |
| Sheet Metal | 12" x 12" x 0.016" | Second | $8.83 |
| Stepper Motor | Bought Two ($12.99 each) | Second | $26.98 |
| Power Supply | --- | Second | $13.99 |
| Motor Shield/Driver | --- | Second | $19.99 |
| Casters | --- | Third | $9.59 |
| Screw Posts | --- | Third | $7.99 |
| MDF | 24" x 24" x 5/8" | Third | $11.99 |
| GT2 20 Tooth Pulleys | --- | Fourth | $6.98 |
| Belts | --- | Fourth | $15.00 |
| Tax/Shipping | $3.74 | --- | $14.96 |
| $1.91 | |||
| $9.31 | |||
| Total: | $143.44 |