Initial Goal
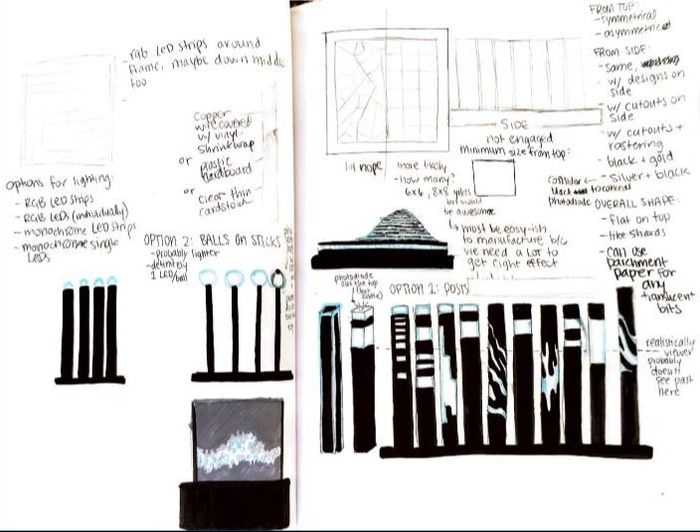
Our initial goal was to create a wave-like sculpture that would react according to the user’s input. We envisioned a 2D or 3D sculpture that would create flowing motion as the person viewing it moved, or something along these lines. At first we wanted to create this visual effect by moving a large quantity of things at once, and considered ways to achieve this with as few actuators as possible.
We ideated and explored two ways of creating this motion, either through a cam shaft or electromagnets. We split into two teams to quickly figure out which of these seemed more feasible through sketch model type implementation.
We ideated and explored two ways of creating this motion, either through a cam shaft or electromagnets. We split into two teams to quickly figure out which of these seemed more feasible through sketch model type implementation.
The Wave Box

The wave box was our first pass at wave motion through cam actuation. This box uses simple nails as our linear followers constrained with plastic cardboard joints, hinges on laser cut fiberboard and a milled aluminum rod. Within 12 hours of work we were able to visualize the motion that cams could make.
The Magnet Test
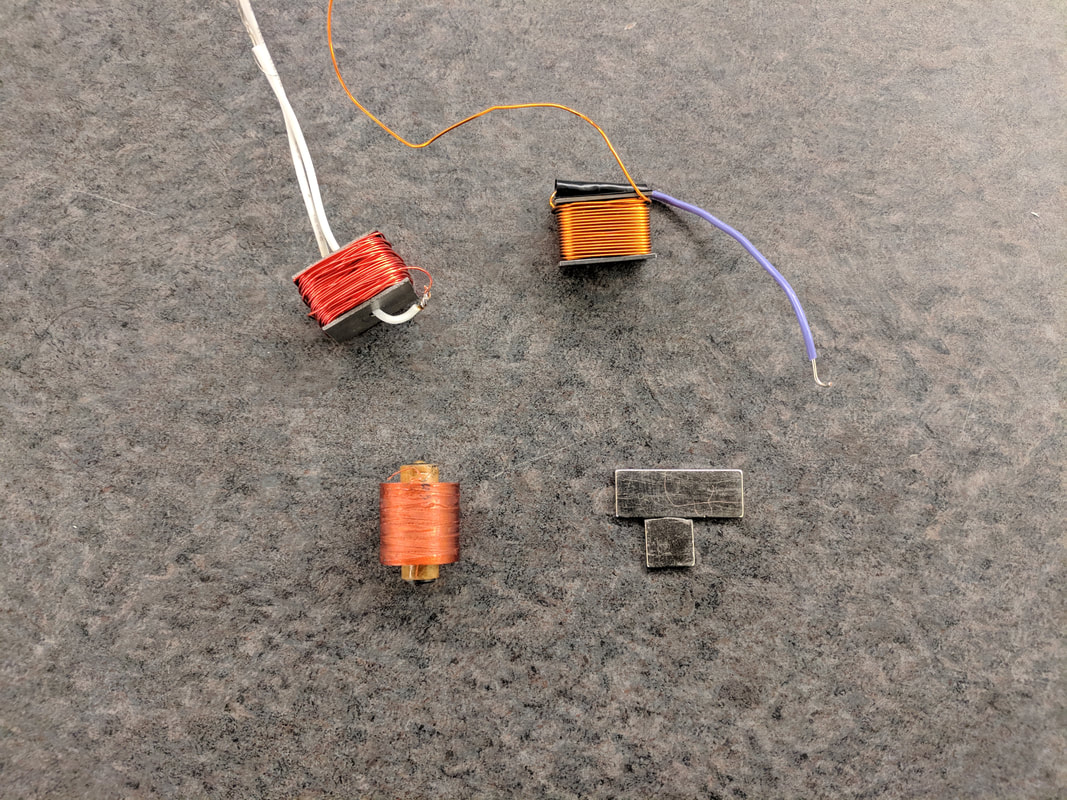
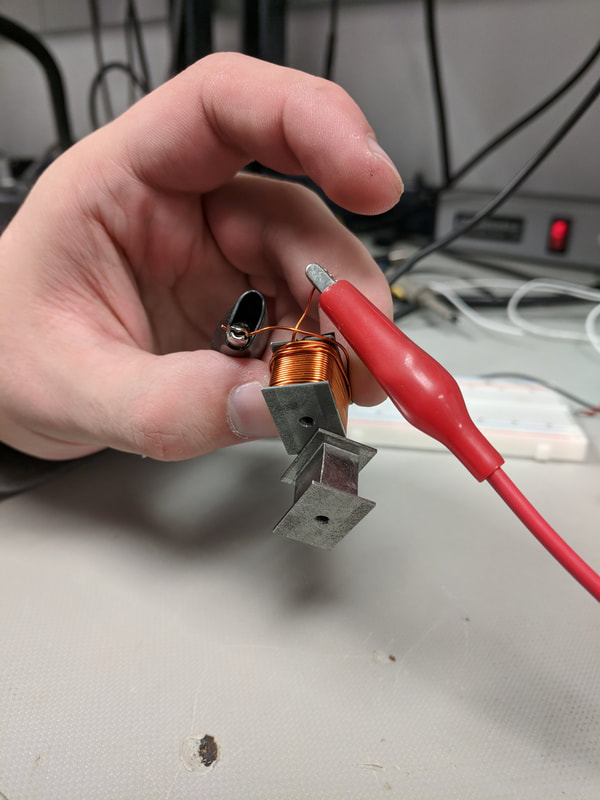
We wanted to see if we could make an electromagnet that would be strong enough to lift a vertical follower, and made a few small scale electromagnets to investigate their power. We succeeded in creating a magnet hat attracted steel, but with more research felt that we would need a lot of materials to make a force strong enough to lift a sizeable object. With this considered, we abandoned the magnet idea and invested more into the idea of mechanically driven systems.
The Spring Test



After making the cam wave box we thought of a new way to drive the system mechanically- with springs. We sketch-modeled this idea by modifying our existing box to actuate everything with springs. We were successful in creating motion with this spring material, but decided we would need to think more carefully about the springs we chose to create successfully flowing motion.
LEDs
We also wanted to create interesting visual effects with lights as well as physical systems. We started experimenting with an LED strip found in our POE lab, and working through ways to change their lighting. We played with the color that the LEDs displayed as well as ways for the LEDs to flash. This video shows the result of this experimentation after Sprint 1.
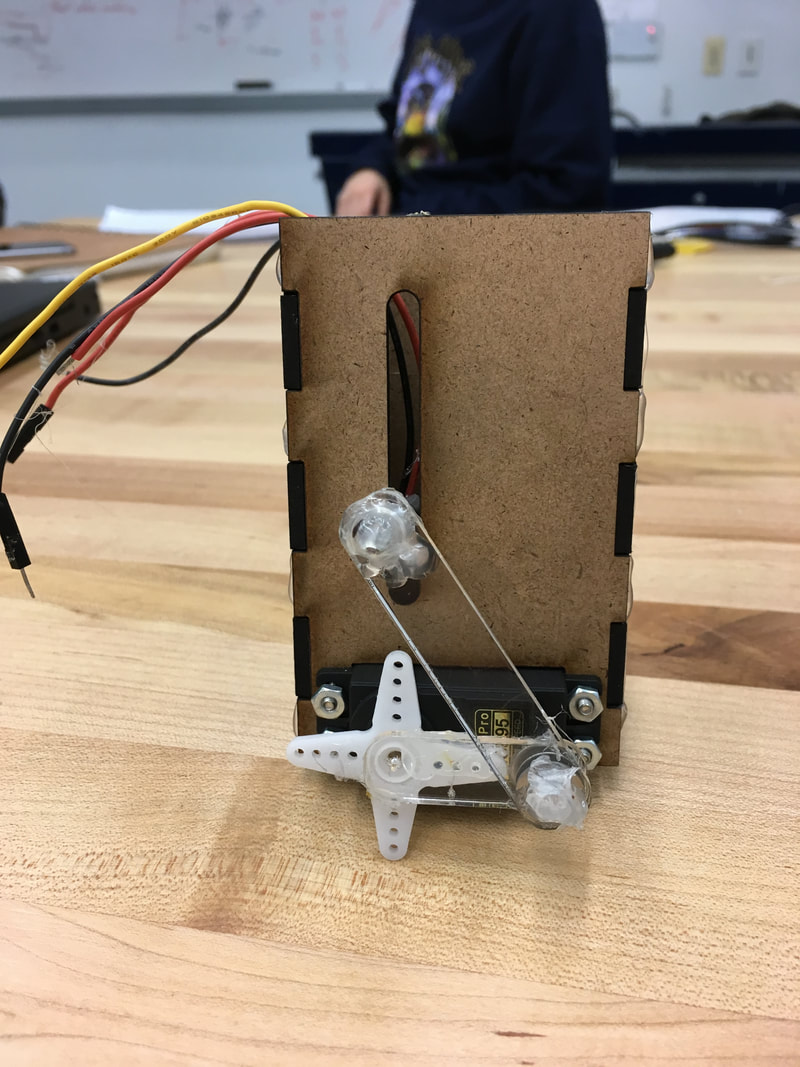
Circuitry and Actuator
|
The result of this experimentation was the conclusion that large scale spring wire would create an interesting motion if actuated in one place. Because of this, we wanted to test and build a single linear actuator.
For our first chance at integration we built a small motor actuator that was driven due to input from a photodiode censor. The motor moved when someone walked in front of the box, triggering the sensor moving the actuator. Our main sensor is a photodiode light sensing circuit which would notify us if something walked in front of it. Connected to that is a stepper motor that rotates 180 degrees and RGB LEDs that are programmed to go through the RGB spectrum when triggered. |
|
Biggest Risks
Size and Price
This idea for large scale visual wave motion meant we would have to build a large number of repeated objects that would have to be assembled individually. This drove up the potential budget and repeated work a large amount. We felt that it would be too expensive, and not fill our learning goals well so decided to change course and pivot.
This idea for large scale visual wave motion meant we would have to build a large number of repeated objects that would have to be assembled individually. This drove up the potential budget and repeated work a large amount. We felt that it would be too expensive, and not fill our learning goals well so decided to change course and pivot.
Our Pivot
|
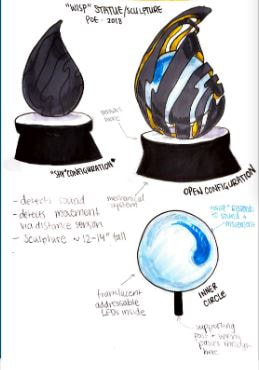
We changed our idea from a large 2D plane with many followers to a single integrated design. The design would still be a kinetic sculpture, but we changed the concept to a teardrop shape that became our final idea.
Initially, we knew that we wanted to a teardrop shape that opened and closed to reveal a 'wisp' object with personality on the inside. The outer shape would open and closed based on user input like before, but now with a single mechanism. We were inspired to do this design from the moods we wanted it to portray. We felt that it would be a nervous creature that shielded itself when spooked and playfully interacted otherwise. Unfortunately, our pivot happened just a day before the sprint presentation and we did not make any progress on the new design before then. |
|
New Goals
- To create a kinetic art sculpture, focusing on the “character” of the sculpture.
- To have consistent and smooth movement.
- To focus on the LEDs as the main feature.
- To have the sculpture react to the user input(s) based on movement and possibly sound.