For sprint 3, we set our goal to be:
In this sprint, our goal was to finish the MVP. We were focused on fabricating all of the new mechanical parts and integrating those with the code and completing the filtering side of the circuit. Fabricating included the functional foot, wrist, and head as well as the aesthetic body and static appendages. On a less technical side, we wanted to start working on our our website and sprint blogs.
Last sprint we realized that often we we were working alone in the POE studio for long hours, which wasn’t a good way to efficiently accomplish things. A less technical goal our team had was to never work alone. From different meetings, we examined that we work better when another person is there to keep us on track and for good company.
We accomplished:
By the end of the sprint we had a completely humanoid drummer. The drummer includes a body, two arms, and two legs shopbotted out of plywood, as well as a laser cut head. For this sprint the drummer has one active arm and one active foot. All necessary parts were machined, lasercut and then assembled to create a functional mechanical system.
At the beginning of this print we made a large electrical pivot, moving away from the previous lowpass filter and the circuit based off of the audio detector chip from sparkfun. Upon further research we learned of a method of filtering that involves two high pass filters and a comparator to make a very narrow range of filtration. This worked as an accurate way to filter for only the kick drum and low frequency instruments of a song.
In this sprint, our goal was to finish the MVP. We were focused on fabricating all of the new mechanical parts and integrating those with the code and completing the filtering side of the circuit. Fabricating included the functional foot, wrist, and head as well as the aesthetic body and static appendages. On a less technical side, we wanted to start working on our our website and sprint blogs.
Last sprint we realized that often we we were working alone in the POE studio for long hours, which wasn’t a good way to efficiently accomplish things. A less technical goal our team had was to never work alone. From different meetings, we examined that we work better when another person is there to keep us on track and for good company.
We accomplished:
By the end of the sprint we had a completely humanoid drummer. The drummer includes a body, two arms, and two legs shopbotted out of plywood, as well as a laser cut head. For this sprint the drummer has one active arm and one active foot. All necessary parts were machined, lasercut and then assembled to create a functional mechanical system.
At the beginning of this print we made a large electrical pivot, moving away from the previous lowpass filter and the circuit based off of the audio detector chip from sparkfun. Upon further research we learned of a method of filtering that involves two high pass filters and a comparator to make a very narrow range of filtration. This worked as an accurate way to filter for only the kick drum and low frequency instruments of a song.
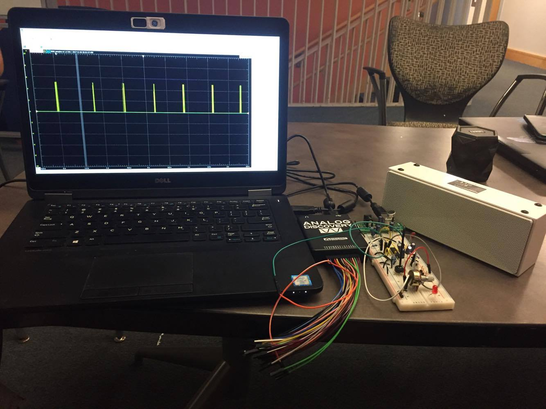
During software and electrical integration, the current software that worked with the old amplitude based sound detection circuit worked well for reading the new circuit’s response to the metronome but not as well for beats of songs. This is because the square wave picked up from a song did encompass the entire beat. The square waves were split up due to thresholding in the circuit and the variableness of the song.
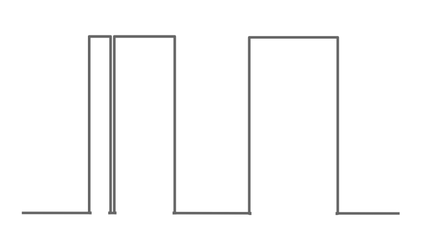
The calibration of the beats was subpar, sometimes we could get the beats to line up but, more often than not they didn’t line up perfectly. It was a game of chance, and something that had to be fixed for the last sprint.
The electrical enclosure - the robot’s head- was also designed, cadded, and fabricated during this sprint. The head holds all of the arduinos and circuitry for the robot.
In the end, we had a drummer that met our MVP. It perfectly detected the beat from a metronome and from songs and could play on a snare and tap its foot.
The electrical enclosure - the robot’s head- was also designed, cadded, and fabricated during this sprint. The head holds all of the arduinos and circuitry for the robot.
In the end, we had a drummer that met our MVP. It perfectly detected the beat from a metronome and from songs and could play on a snare and tap its foot.