For sprint 1, we set our goal to be:
At the end of each two week sprint during the project, we need to have a fully integrated prototype. Our goal for this first sprint was to get a better idea of the constraints of our system by building a single prototype arm that can hit a drum to a beat determined by audio input. We also hoped to start looking at a foot and working with playing different rhythms.
We accomplished:
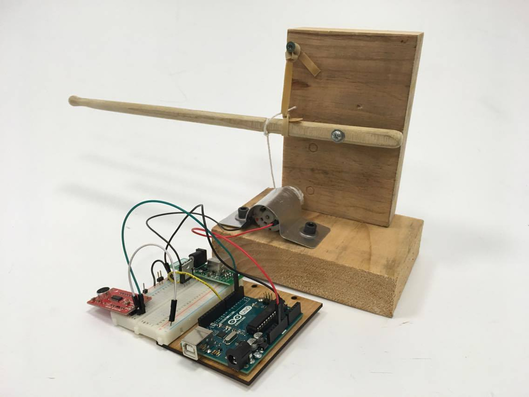
At the beginning of the sprint we researched for types of linkages and ways to make our robot hit the drum, and stumbled across a great instructable that was doing something very similar (https://makezine.com/projects/make-robotic-drum-using-arduino-uno/). We took ideas from the tutorial and designed a simple mechanism to get a small DC motor to rotate our drumstick (stick-on-a-servo). By the end of the sprint we were able to have a single axis of rotation system to turn a drum stick to hit a drum. We also had an actuating foot pedal that was functional enough to verify that it would be possible to create an actual actuator. One decision this sprint was whether to have something that mimicked a foot or to have something that directly hit the drum. Since we want to make a robotic drummer and not a drumming machine, we decided to make something that acted like a foot.
This was controlled by a simple circuit: This circuit had a chip with a microphone that was able to detect the beats of a metronome. This chip worked very well for these initial testing purposes. After getting the circuit working, we began to look at how the circuit was created so that in the next sprint we could start making our own circuit that had similar functionality but could be tuned more towards our purposes. Another decision we discussed during this sprint was the beat detection and how realistic it would be in electrical hardware, including what the problems would be. We decided it should be feasible and that we would continue on with is for another sprint.
Software focused a lot on integrating with mechanical and at the end with electrical. We got the DC motors working to make sure the simple set-up worked. As soon as the simple circuit was set up, we were able to figure out how to read what to do with the signals we received from it. We used Arduino's pulseIn function to find the period of the signal. We worked to create different rhythms so we were able to play different rhythms at the speed we picked up.
Overall this was a good start to the project. By the end, we felt we had a very strong direction to go in. This sprint we learned a lot about each other’s work habits while also making a lot of decision about what our project was actually going to be. At the end of this sprint we set a goal to have a check in before and after every meeting to discuss what was going to happen that day and then debrief what did happen. The hope was that this would help us stay on track.
Some challenges we faced were:
We overcame them by:
- Build a single arm that can hit a 'drum' and be controlled by an arduino
- Some semblance of beat detection with a metronome
At the end of each two week sprint during the project, we need to have a fully integrated prototype. Our goal for this first sprint was to get a better idea of the constraints of our system by building a single prototype arm that can hit a drum to a beat determined by audio input. We also hoped to start looking at a foot and working with playing different rhythms.
We accomplished:
- Mech-e: inspired by video, built replica, ideated final view
- ECE: Research into filtering and Sparkfun Chip
- Software: interfacing with motors and electrical system, preliminary calibration
At the beginning of the sprint we researched for types of linkages and ways to make our robot hit the drum, and stumbled across a great instructable that was doing something very similar (https://makezine.com/projects/make-robotic-drum-using-arduino-uno/). We took ideas from the tutorial and designed a simple mechanism to get a small DC motor to rotate our drumstick (stick-on-a-servo). By the end of the sprint we were able to have a single axis of rotation system to turn a drum stick to hit a drum. We also had an actuating foot pedal that was functional enough to verify that it would be possible to create an actual actuator. One decision this sprint was whether to have something that mimicked a foot or to have something that directly hit the drum. Since we want to make a robotic drummer and not a drumming machine, we decided to make something that acted like a foot.
This was controlled by a simple circuit: This circuit had a chip with a microphone that was able to detect the beats of a metronome. This chip worked very well for these initial testing purposes. After getting the circuit working, we began to look at how the circuit was created so that in the next sprint we could start making our own circuit that had similar functionality but could be tuned more towards our purposes. Another decision we discussed during this sprint was the beat detection and how realistic it would be in electrical hardware, including what the problems would be. We decided it should be feasible and that we would continue on with is for another sprint.
Software focused a lot on integrating with mechanical and at the end with electrical. We got the DC motors working to make sure the simple set-up worked. As soon as the simple circuit was set up, we were able to figure out how to read what to do with the signals we received from it. We used Arduino's pulseIn function to find the period of the signal. We worked to create different rhythms so we were able to play different rhythms at the speed we picked up.
Overall this was a good start to the project. By the end, we felt we had a very strong direction to go in. This sprint we learned a lot about each other’s work habits while also making a lot of decision about what our project was actually going to be. At the end of this sprint we set a goal to have a check in before and after every meeting to discuss what was going to happen that day and then debrief what did happen. The hope was that this would help us stay on track.
Some challenges we faced were:
- Pulling one drum from complicated audio
- No wrist flick in motion
- Complicated control for motor
- Not a lot of time to meet together
We overcame them by:
- To pull drum from a complicated file, we decided we would dissect the chip and recreate it so we could add a filtering stage
- We started looking at the lack of wrist flick the second sprint with an entirely new mechanical system
- We decided that in the following sprints we would start to look at encoders or potentiometers so we could control the motors more easily
- Communication is key! In the future, we would start communicating more and telling each other our goals and process before and after meetings.