Final Push
Week 7
Sprint Overview
After our demo day, we fixed many of our problems with our previous model, including printing a new motor mount, replacing the motors, and replacing the potentiometers.
Motor Mount
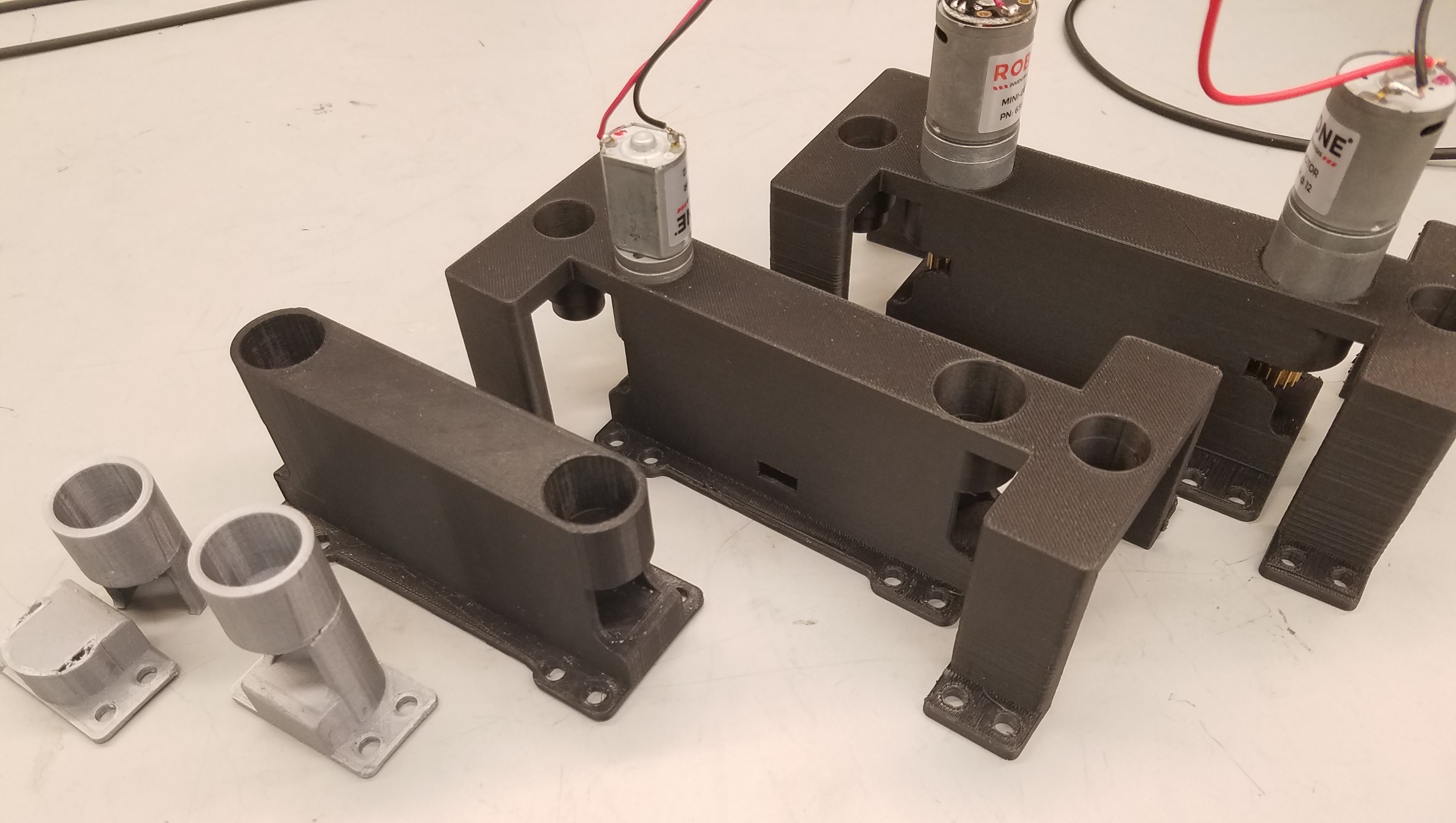
We printed a new motor mount, which constrained the motors and distributed torque better. It also held the gears in place, so they didn’t shift outward. This worked much better than our previous iteration. However, after a lot of testing it bent under the stress from the motor and made it impossible for the gears to mesh. For Expo we plan to make a sheet metal mount that supports the end of the motor shaft and will not deform under stress.
Motors
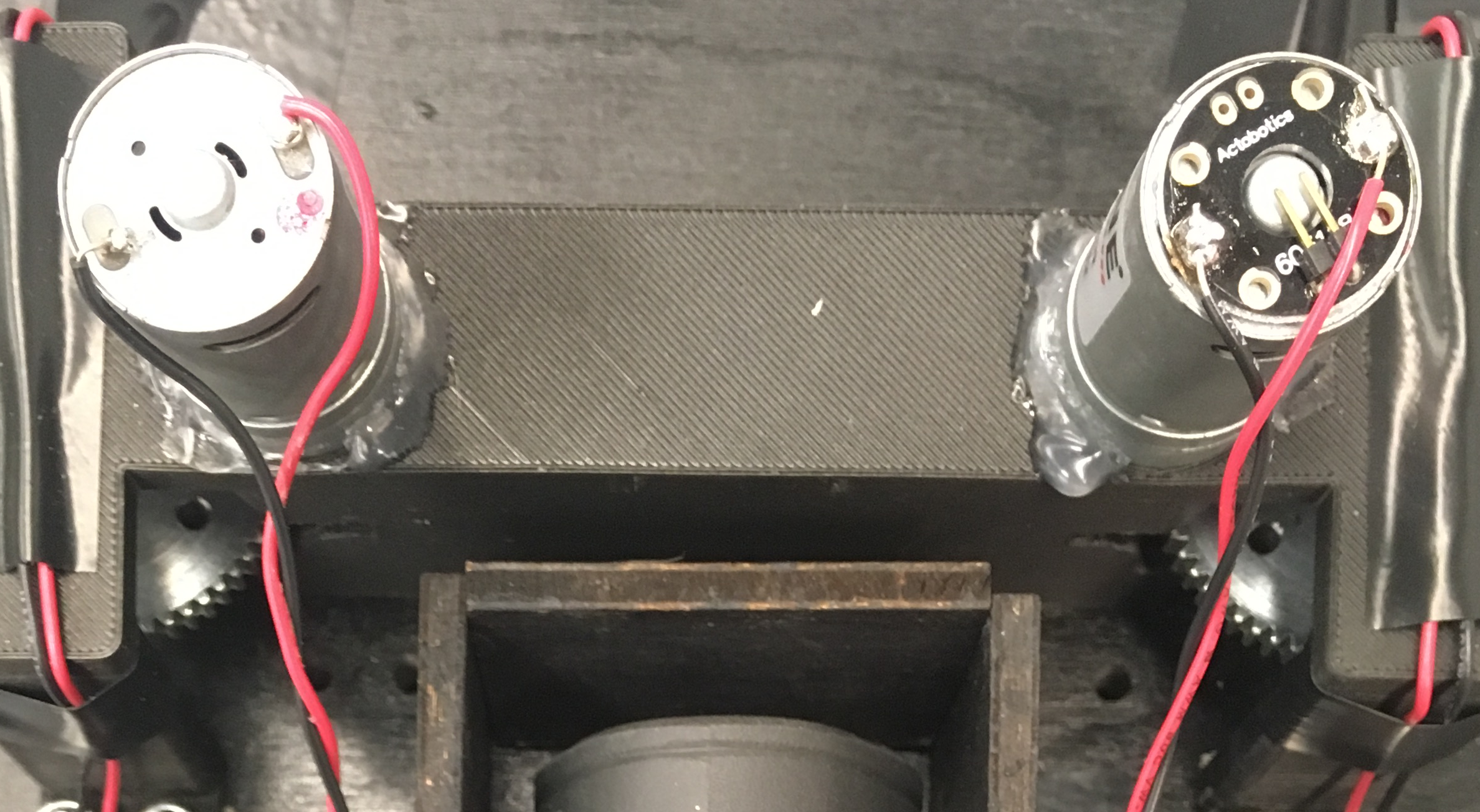
We ran into some difficulties with our other motors because they were not strong enough, and unfortunately one of them broke. We replaced them with higher torque motors, which lifted the wings. We had to create yet another new motor mount to accomodate the differently sized motors, but the rest of the system fit the new motors in without any change.
Potentiometers
We integrated our flex sensors, mapping the minimum and maximum sensor values to go to a wing angle and each value between that along a linear function to ensure that the wing raised and lowered with arm movement. It was attached securely to the shoulder strap and then to an elastic material which was in turn connected to a fabric arm band.
Feathers

We painted, glittered, and reattached the feathers. We discovered that hot glue was the most aesthetically pleasing method of attaching the feathers to the wire, because it was less visible and smaller than other adhesive options at our disposal.
Ultrasonic Sensors
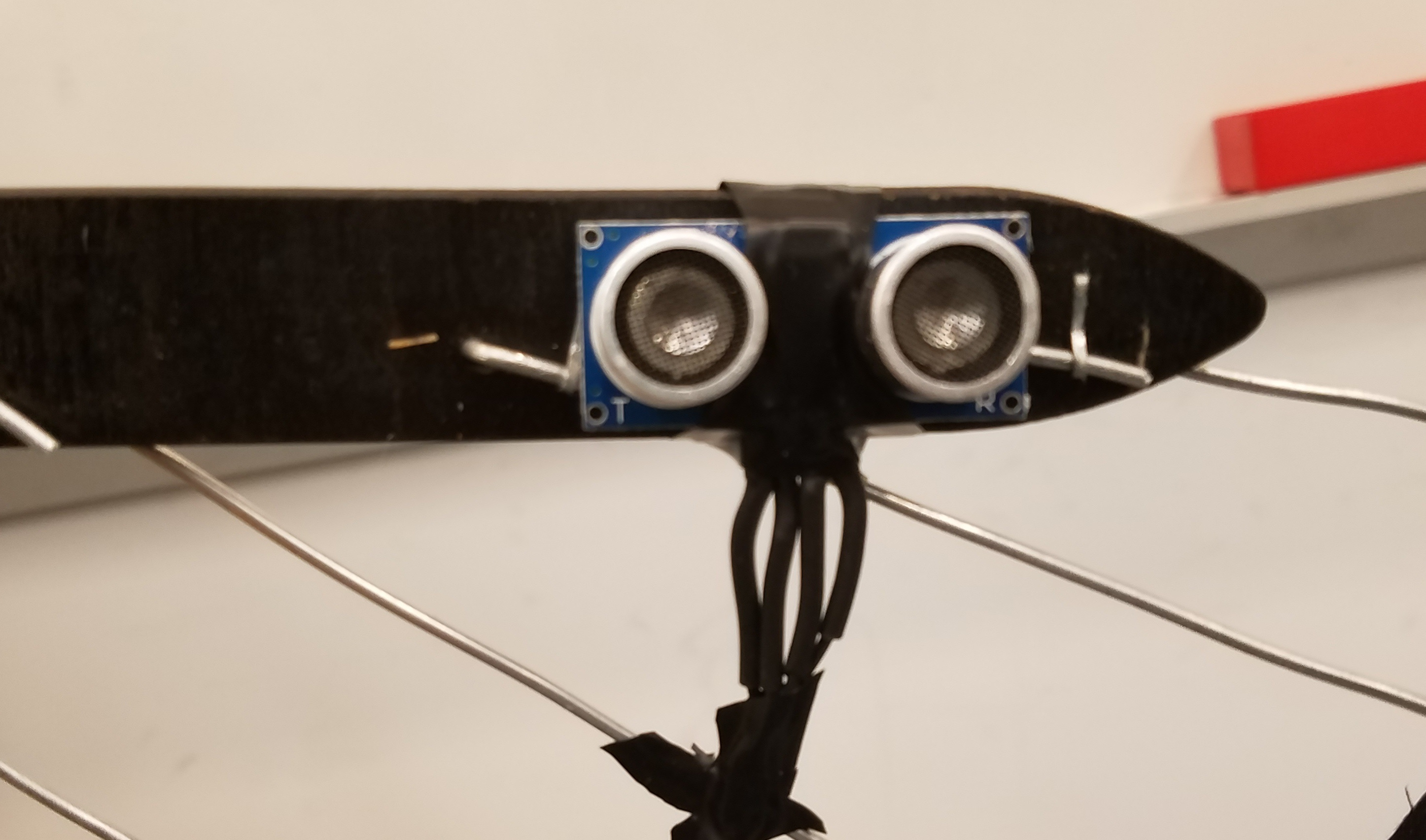
We attached all 4 ultrasonic sensors, and integrated them into the program so when any of them notices that something is too close, both wings respond by folding down. While these sensors are still the slowest thing in our code, the response time was fast enough to not be problematic.
Motion Software
Because the motors are slightly different speeds, the more they flap the more out of sync they get. Because of this we created a “waiting” state, when a wing reaches the top or bottom it doesn’t move again until the other wing meets it.