Sprint Goal:
Finalize current system for MVP, and create the final iteration
Finalize current system for MVP, and create the final iteration
Overview:
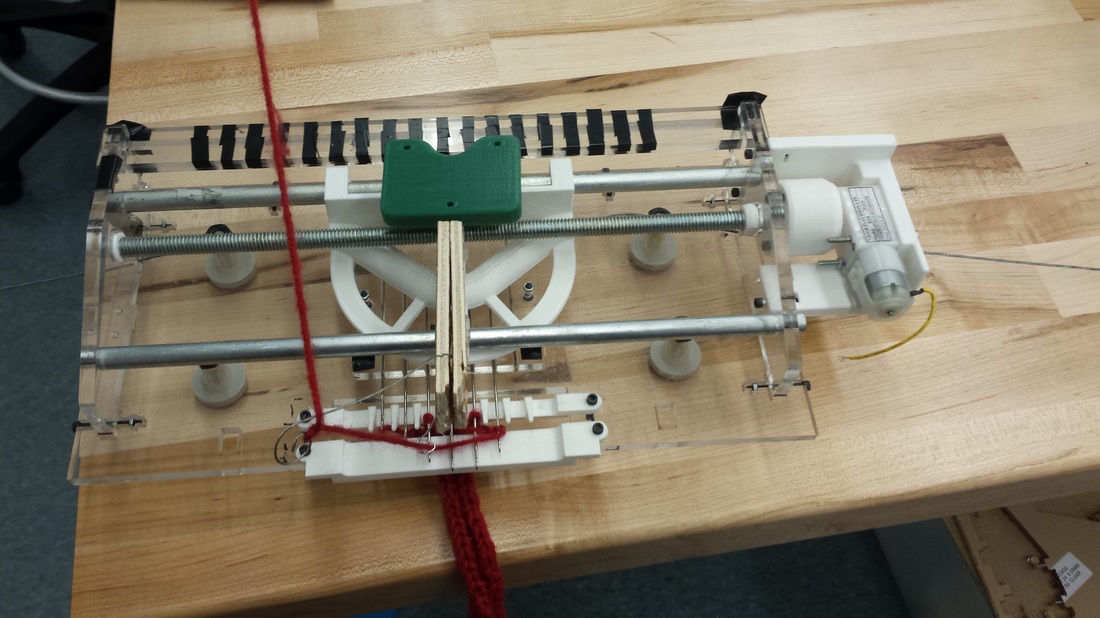
This sprint was about turning our research and experimentation into the final product, capable of simple knitting. In short, after lots of small, rapid iterations of each piece (to refine it from the nearly functional system last sprint), we have a polished automatic knitting machine. We got the mechanical system working with stitches forming with from the motion of the automated carriage with out human intervention. However the code and sensor attachment still needs work.
This sprint was about turning our research and experimentation into the final product, capable of simple knitting. In short, after lots of small, rapid iterations of each piece (to refine it from the nearly functional system last sprint), we have a polished automatic knitting machine. We got the mechanical system working with stitches forming with from the motion of the automated carriage with out human intervention. However the code and sensor attachment still needs work.
|
Pre-Sprint Events:
Several members of the team will be at the school during all or part of Thanksgiving Break. It is an opportune time to work on the project.
|

|
|
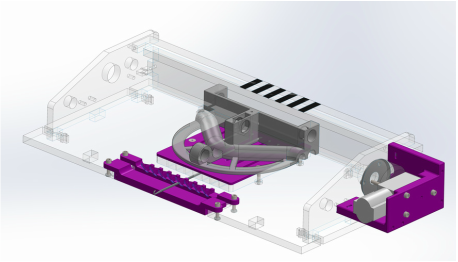
Sprint Events: Event: Construction
Event: Verge Tests headed by Aubrey and Claire
Event: Stitch Tests headed by Aubrey and Claire
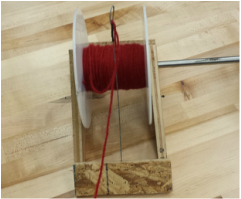
Event: Yarn Spool headed by Joe, Claire, and Aubrey
Event: More Acrylic headed by Claire and Aubrey
Event: More 3D Printing headed by Claire and Sean
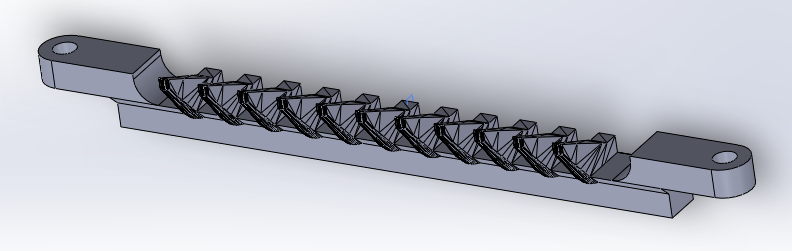
Event: Needle Guide headed by Claire and Sean
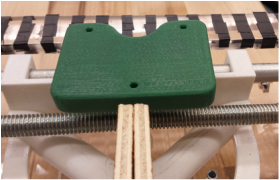
Event: Yarn Tension and Guide
Event: Circuit Holder headed by Paul and Claire
Event: Test Integrated headed by Aubrey and Sean
|
|
|
|
Risks:
Still no complete MVP!
Still no complete MVP!
Decision:
We decided to focus on completing and refining the small needle bed, and then expanding it until it was large enough to knit a human-wearable scarf, instead of trying to implement any new features. Additionally we would like our final iteration to be completely disassemble-able . No hot glue or jankiness.
We decided to focus on completing and refining the small needle bed, and then expanding it until it was large enough to knit a human-wearable scarf, instead of trying to implement any new features. Additionally we would like our final iteration to be completely disassemble-able . No hot glue or jankiness.