Inkscape
Sprint One
The stories of Agnes and Bertha
Agnes's Life as a Recycled Robot
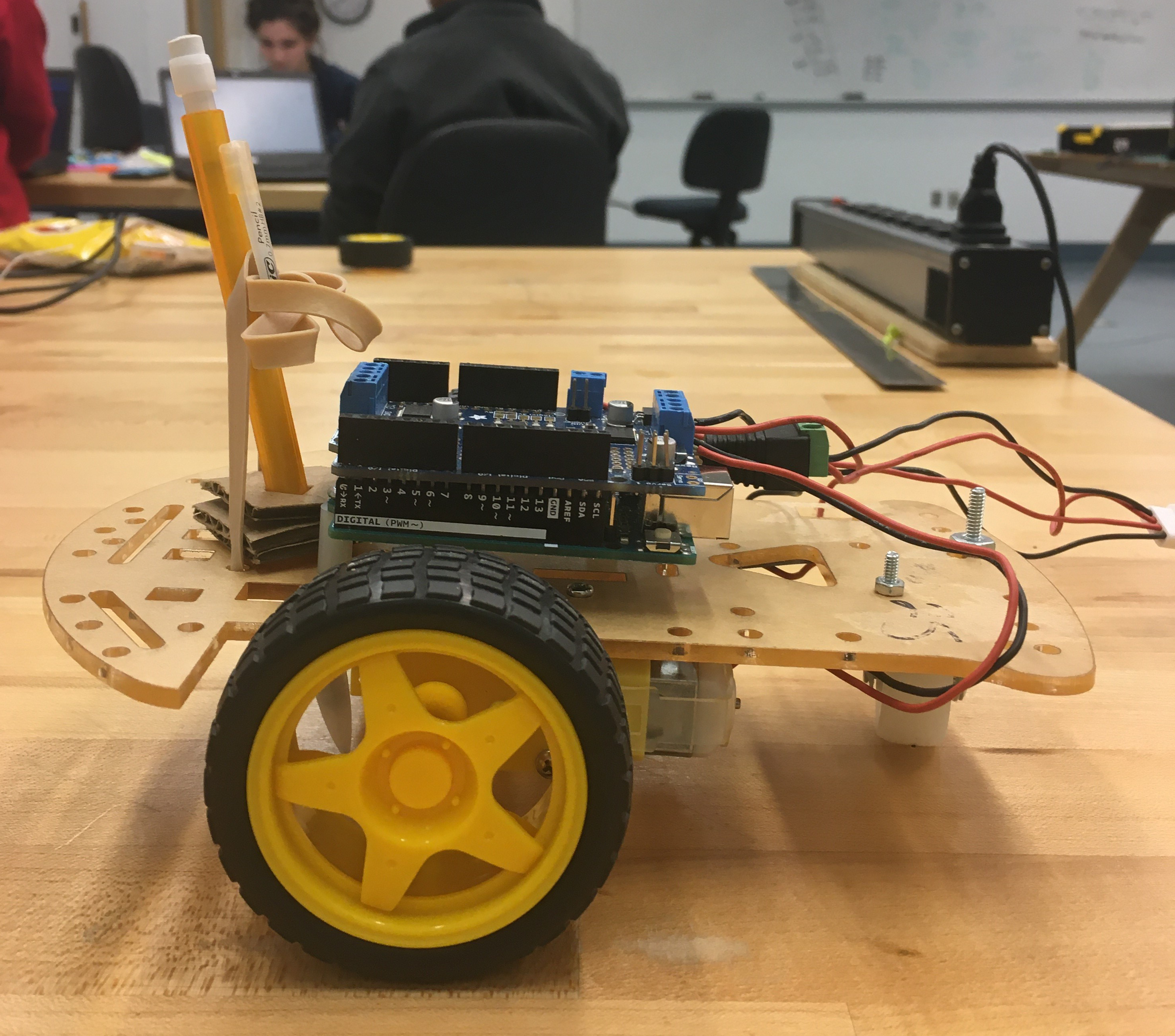 We built our first iteration, Agnes (shown on the left), by adapting a line-following robot that we had built for a previous lab; we wanted to take advantage of the existing mechanical structure we had so that we could try to reach our minimum viable product as soon as possible. Reaching our MVP was important for us to be able to gauge how difficult the MVP truly was and therefore also set our stretch goals.
We built our first iteration, Agnes (shown on the left), by adapting a line-following robot that we had built for a previous lab; we wanted to take advantage of the existing mechanical structure we had so that we could try to reach our minimum viable product as soon as possible. Reaching our MVP was important for us to be able to gauge how difficult the MVP truly was and therefore also set our stretch goals.
 To build our MVP, we used the chassis from the line-following robot and attached a very simple pen mount prototype. We also wrote code to control the robot's motion through the Arduino Serial monitor, with simple commands encoded to make Agnes turn, speed up, slow down, move forward, go backwards, or stop. Using these commands, we were able to control Agnes to draw something that we think could reasonably be called art (think Jason Pollock!), as shown in the GIF on the right.
To build our MVP, we used the chassis from the line-following robot and attached a very simple pen mount prototype. We also wrote code to control the robot's motion through the Arduino Serial monitor, with simple commands encoded to make Agnes turn, speed up, slow down, move forward, go backwards, or stop. Using these commands, we were able to control Agnes to draw something that we think could reasonably be called art (think Jason Pollock!), as shown in the GIF on the right.
The Birth of Bertha
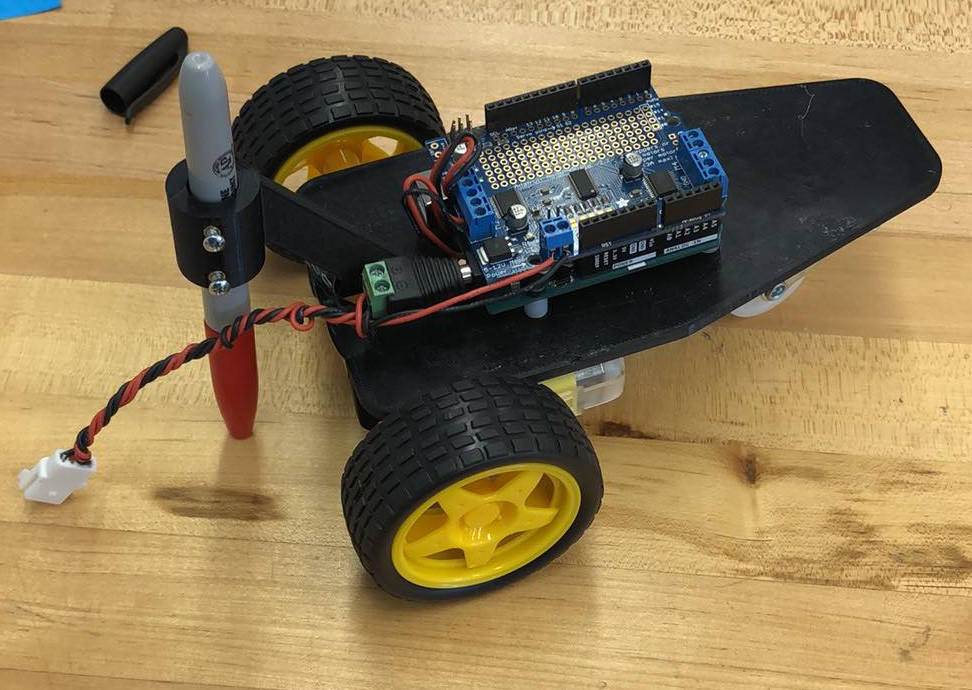 Our second iteration was Bertha (shown to the left). Our goals with designing Bertha were to design and build a better mechanical structure so that we wouldn't be dependent on the chassis that we had used in the line-following robot lab--especially since that chassis wasn't optimized for the sort of structures that we wanted to include (like an active pen mount). We also wanted to try to minimize the chassis, as one of our ultimate stretch goals was to build multiple robots that could work together to draw art.
Our second iteration was Bertha (shown to the left). Our goals with designing Bertha were to design and build a better mechanical structure so that we wouldn't be dependent on the chassis that we had used in the line-following robot lab--especially since that chassis wasn't optimized for the sort of structures that we wanted to include (like an active pen mount). We also wanted to try to minimize the chassis, as one of our ultimate stretch goals was to build multiple robots that could work together to draw art.
 We designed and 3D-printed a better chassis design that integrated the pen mount more elegantly (as is demonstrated in the GIF to the right). We also created an updated passive pen holder that could apply enough pressure on the Sharpie that the Sharpie would consistently draw on our chosen surface rather than skipping at times. One of the main changes to the chassis involved making it smaller in an attempt to make Bertha more compact and miniaturized in comparison to Agnes. We also did our best to position supports and extrusion on the underside of the chassis for more streamlined aesthetics, better use of space, and, most importantly, to prevent the need to add supports to the 3D print of the chassis (which reduced the print time and improved print reliability). The pen holder was designed to be passive (no actuation) and drew inspiration from oblique calligraphy pens. The pen holder allows a writing implement (Sharpie) to be fixed in place via two set screws that could be tightened as needed and was attached to the chassis loosely by a bolt that allowed the pen holder to pivot. This loose connection allowed gravity to help the pen/marker to maintain constant contact with the ground. Bertha was our first self-created chassis design.
We designed and 3D-printed a better chassis design that integrated the pen mount more elegantly (as is demonstrated in the GIF to the right). We also created an updated passive pen holder that could apply enough pressure on the Sharpie that the Sharpie would consistently draw on our chosen surface rather than skipping at times. One of the main changes to the chassis involved making it smaller in an attempt to make Bertha more compact and miniaturized in comparison to Agnes. We also did our best to position supports and extrusion on the underside of the chassis for more streamlined aesthetics, better use of space, and, most importantly, to prevent the need to add supports to the 3D print of the chassis (which reduced the print time and improved print reliability). The pen holder was designed to be passive (no actuation) and drew inspiration from oblique calligraphy pens. The pen holder allows a writing implement (Sharpie) to be fixed in place via two set screws that could be tightened as needed and was attached to the chassis loosely by a bolt that allowed the pen holder to pivot. This loose connection allowed gravity to help the pen/marker to maintain constant contact with the ground. Bertha was our first self-created chassis design.