Software
Data Flow
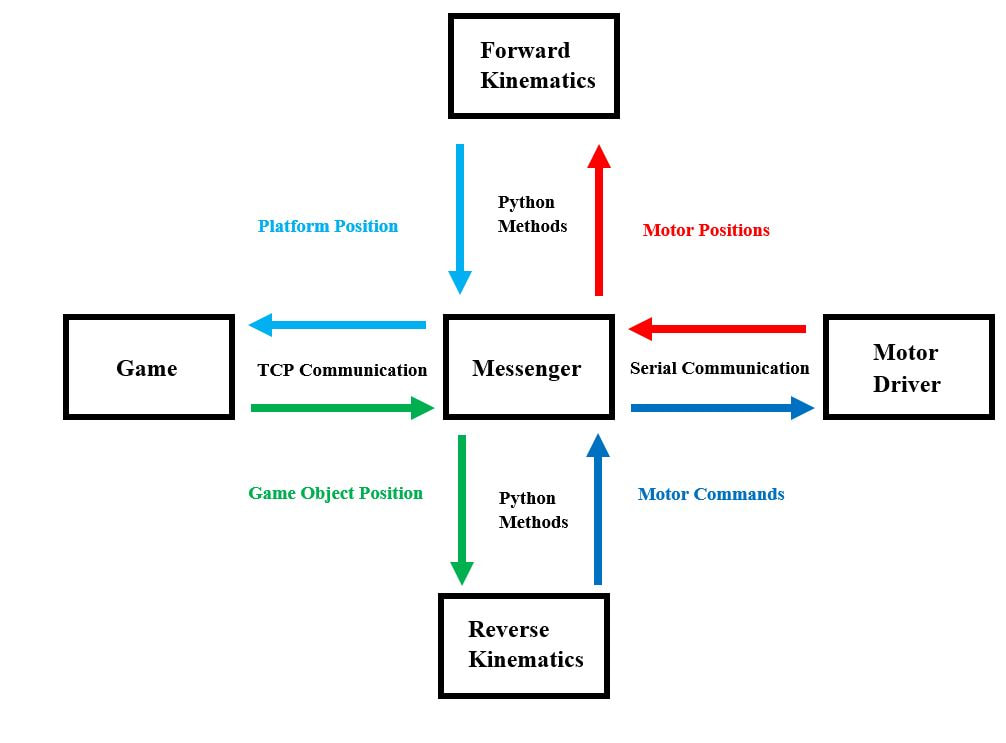
The main computer communicates with the Teensy microcontroller board using Serial. However, only one program can listen to serial port at a time. This made it necessary to create 5th program that just relays messages back and forth between the game, kinematics, and motor driver. Since the game and kinematics are written different languages (C# and Python) the two can not communicate directly. In order to send data from the game to the python, we used a Unity to python TCP network client written by github user Fulviuus. All of the code used to run the project can be found here.