It's Mackenzie again,
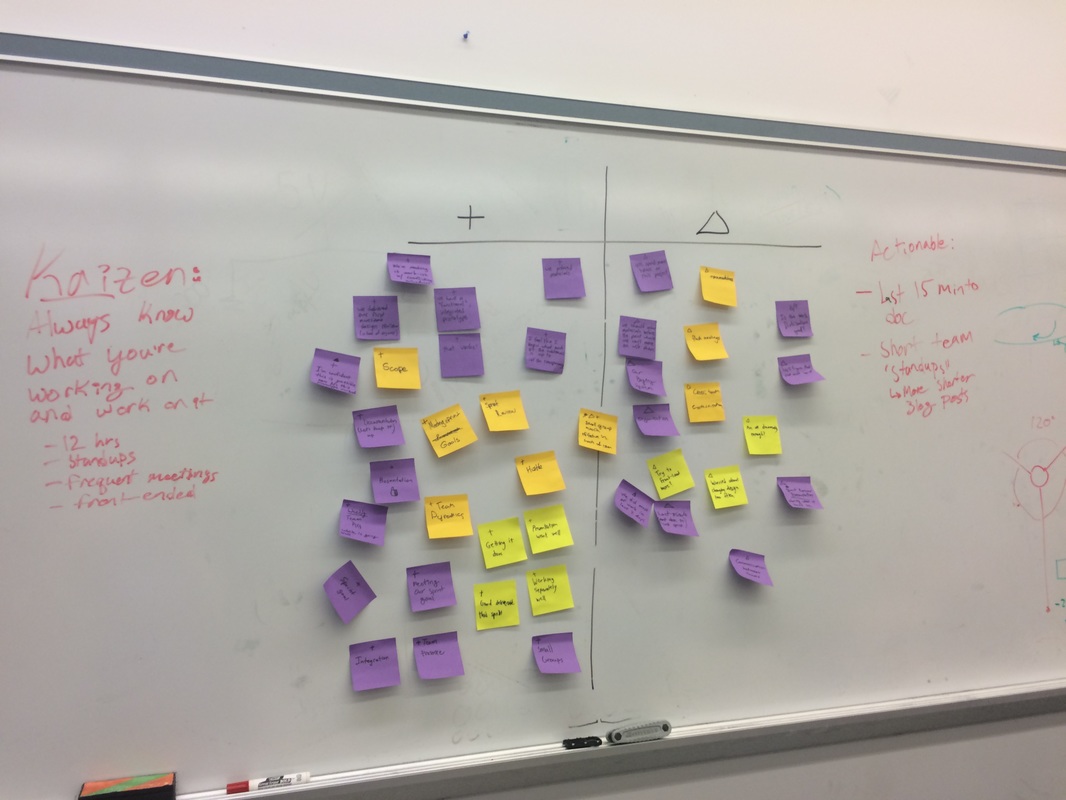
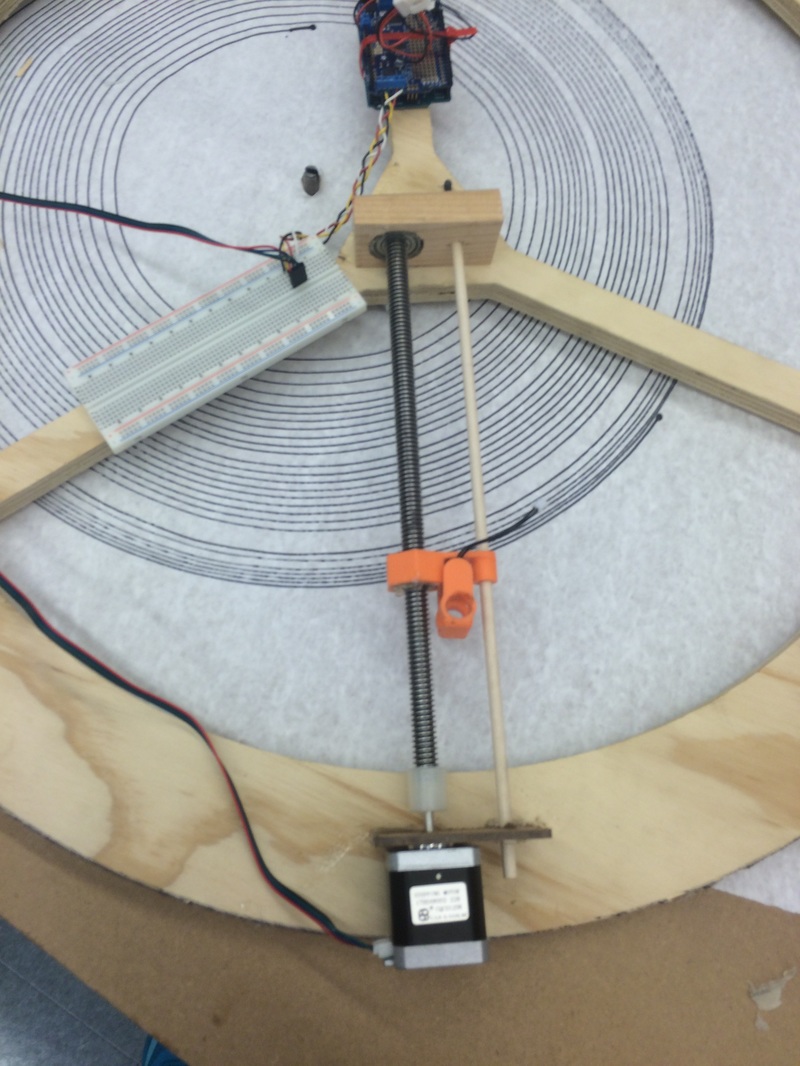
Today we reviewed Sprint 2 as team, focusing on what went well and what could have gone better. As you can see in our "delta plus chart" below, we had a lot to talk about. As a team, we agreed we were proud to meet our sprint goal: a one-marker machine that intentionally draws a spiral. The video is below.
We also agreed that we need to change how we weight work throughout the course of the sprint; the majority of work in Sprint 2 was done in the last two days. This lead us to our kaizen: "Always know what you're working on and work on it." We plan to fulfil this, in part, by commiting a full 12 hours a week on our project, having frequent all-team standups where we present our work, have more frequent meetings, and front-load the majority of sprint work. We also plan to commit the last 15 minutes of all team meetings to documentation.
Today we reviewed Sprint 2 as team, focusing on what went well and what could have gone better. As you can see in our "delta plus chart" below, we had a lot to talk about. As a team, we agreed we were proud to meet our sprint goal: a one-marker machine that intentionally draws a spiral. The video is below.
We also agreed that we need to change how we weight work throughout the course of the sprint; the majority of work in Sprint 2 was done in the last two days. This lead us to our kaizen: "Always know what you're working on and work on it." We plan to fulfil this, in part, by commiting a full 12 hours a week on our project, having frequent all-team standups where we present our work, have more frequent meetings, and front-load the majority of sprint work. We also plan to commit the last 15 minutes of all team meetings to documentation.
| |  Sprint 2 retro: Kaizen and delta-plus |
 RSS Feed
RSS Feed