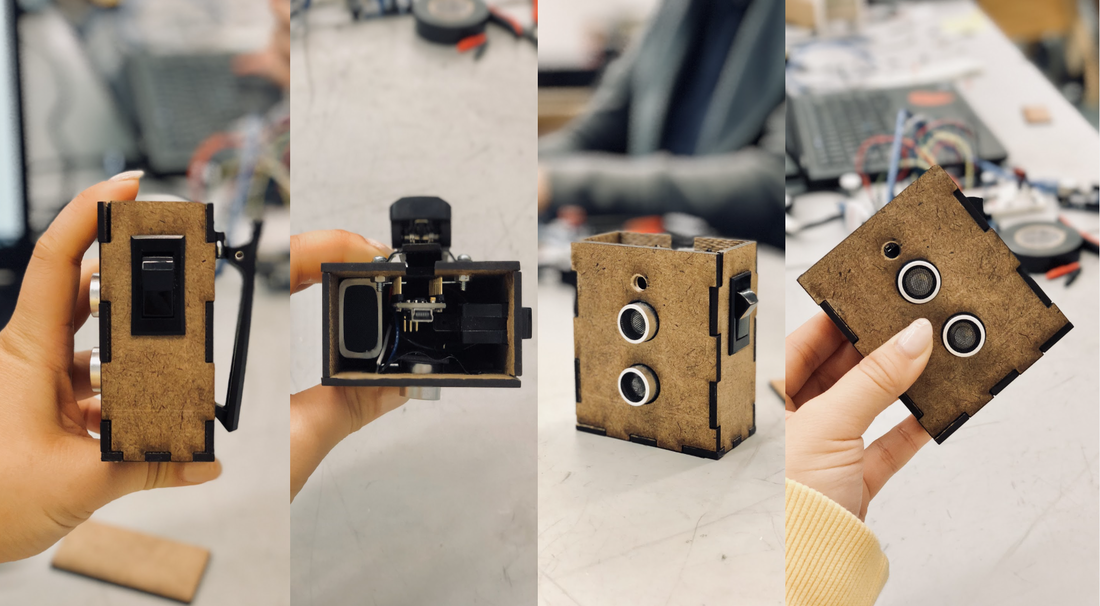
MechanicalThis sprint was mainly about fixing issues we found in Sprint 2. We ended up re-CAD-ing the wheels to include supports on both sides so that they wouldn’t flop to the sides, and we also CAD-ed new motor mounts specifically sized to the motors to help eliminate the same issue. We also had to fix the chassis CAD quite a bit, adding more holes for screws and the added wheel supports, adjusting the way a couple of the walls connected to the baseboard, and adjusting the size of the holes for the sensors so they fit better. Once we had everything built, we then fully integrated it all with the electrical components.
|

|
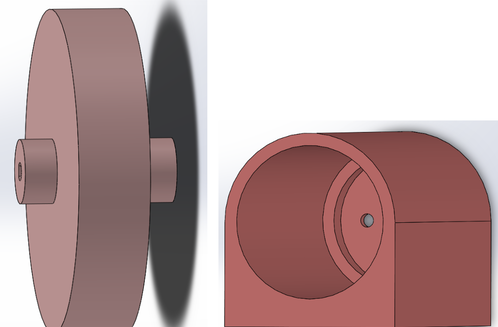
Clip Mount for Beacon
|
The clip got a lot more work this sprint. “A mini PoE project in itself,” we were able to change from a 3D print design to a laser cut design. We made this choice because we wanted a way to house all the wiring so that it would have a clean look on the outside and would match the aesthetic of the robot. Our final design strategically encases the Arduino Nano, a 9V battery with an detachable battery snap to enable easier changing to new batteries, the IR sender and the ultrasound sender. It will be attached to the person’s pocket by a clip on the back.
|

|
Electrical
|
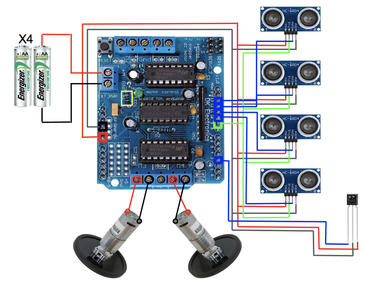
This IR and ultrasound combo worked because light is far faster than sound. A lot of experimentation with millis() timing in code and making the beacon and sensors as accurate as possible.
We decided on the best powering methods decided on, which was a 9V battery in the beacon, 8 AA batteries for the sensor Arduino, and the large battery for the motors. |
|
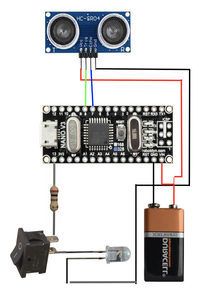
Electrical for Beacon
|
We also experimented with buttons and switches for the beacon circuit and decided on a switch that physically broke the circuit. The final beacon circuit was completed and worked. It is wired as indicated on the circuit diagram to the left, and the switch was chosen based on availability and aesthetics. The switch acts as a breaker between the power and the IR sender, basically turning the IR on and off.
|
Software
The code has been updated since sprint 2 but the overall structure of it has stayed the same. We are still using communication between the IR sensor and LED to match the pulsing of the ultrasonic sensors. This sprint we have added a simpler method to parse the data and better timing. This has included testing and changing the order of which the sensors are called and the motors are activated. This helped because the motors have been responding to incorrect values. In addition, we are being more careful about the values we are reading from the ultrasonic sensors and choosing not to read unreasonable values outside of our sensor’s range.
Kaizen
We really wanted to work on improving aesthetics in the final sprint (along with perfecting the actual systems, of course).