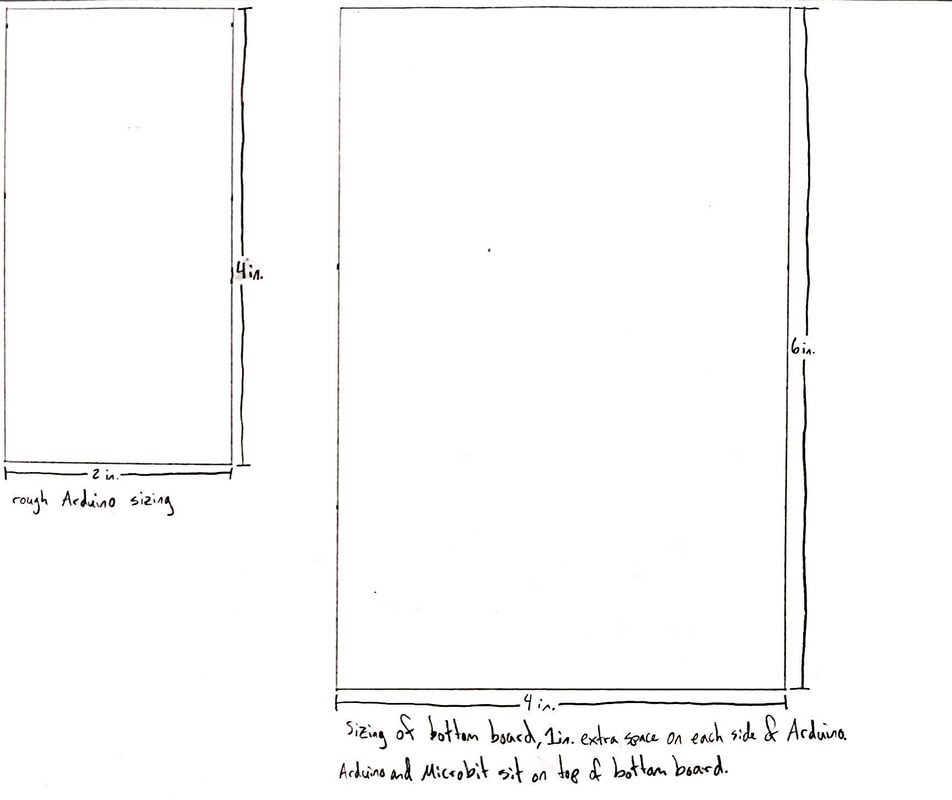
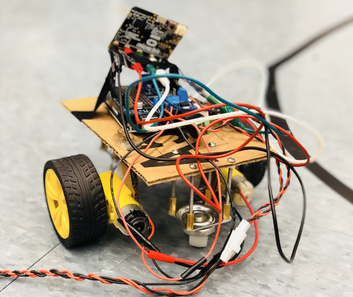
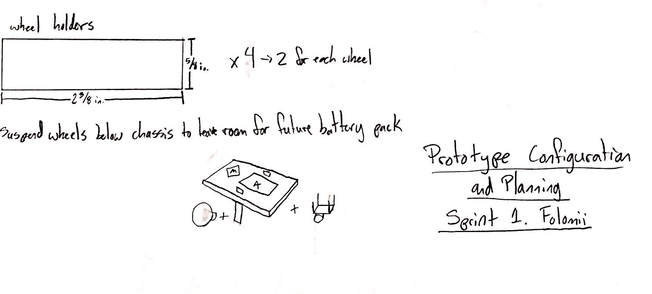
MechanicalWe spent the beginning of Sprint 1 coming up with a plan for what we wanted our project to be, and began on creating our prototype. Also, we, as a team, decided we wanted to keep financial costs low for as long as we could. To that end, we decided to make our original prototype out of cardboard and hot glue, since we could use that for free. We also decided to use the wheels and motors from the Line Following Robot lab, since they were cheap and convenient, and worked nicely for the shorter time frame we had given ourselves. After making these decisions, we had to come up with a basic chassis. We made just a baseboard for the electrical components to sit on top of; the biggest fabrication challenge was connecting the motors to the baseboard. As seen in the schematics above, the solution was to cut out strips of cardboard that would fit into slits on the baseboard and hang down vertically, providing a surface for the motors to be attached to.
|
|
|
|
Electrical
|
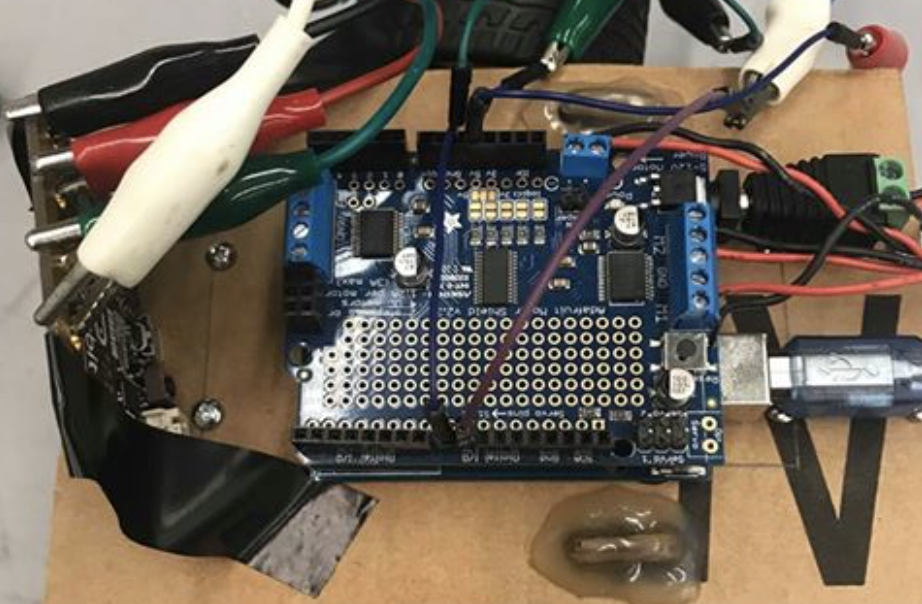
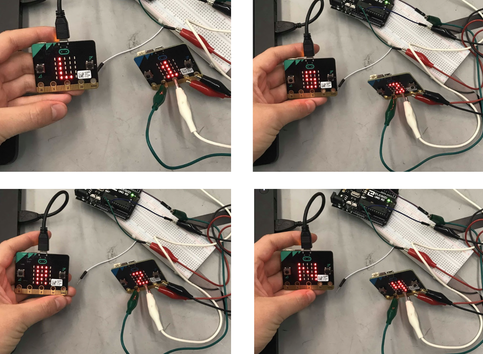
In Sprint 1, we primarily experimented with radio communication on microbits. We were able to control robot movement wirelessly through microbit controls on first prototype robot. We also completed first motor control circuit wired to microbits. We decided to have the robot use bluetooth signals to determine where a beacon was. After the sprint review and we got feedback, we also began to consider non-bluetooth ways of following, and we kept the idea of ultrasound in the back of our minds.
|
Software
|
For the first sprint, we were using two microbits and an arduino. The microbits communicated between each other by sending over a series of numbers based on physical commands, such as shaking and tilting. They are coded with a combination of block coding and javascript. Each physical command was associated with a number that would be sent over radio frequencies. The microbit on the robot received the number and sent that information onto the arduino through a digital output of high or low voltages. The arduino then used a simple algorithm to direct the motors on which way the original command intended for them to turn.
|
|
Kaizen
We want to allocate an extra chunk of time, weekly, to work on POE. If someone asks something, show proof of thought or response.