

Sprint 1
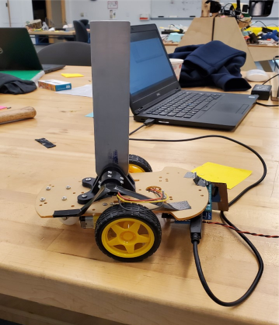
In the first sprint, we simulated our inverted pendulum by using the motors and the chassis used in the line following robot and attaching a bar over the chassis. We also created a PID to control motor velocity and balance through angle control


