Sprint 1: When We Were Still Bright Eyed And Bushy-Tailed
When the assignment first started we were chock-full of ideas of what we wanted to do. We wanted to do something challenging, fun, and that had an impact on the world. And after a few brainstorming sessions, we landed on what we would do: a tele-robotic hand that had haptic feedback and the precision to do surgery on a grape. We had an idea about how difficult that would be, but started prototyping and diving in to try and get a better estimate.

This was the drawing for the first pass at Handy, it included a glove that could used to control a robotic pincher via a gyro and a button.
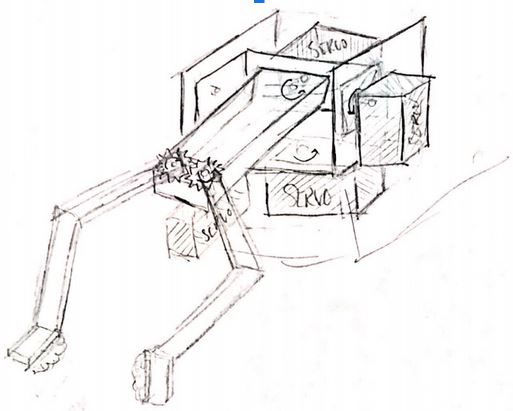
This was the sketch for the first mechanical system, it included two servos that would handle the roll and pitch of the wrist, plus a third servo that would control the pinch. It was a great start to the system that was just around the corner.
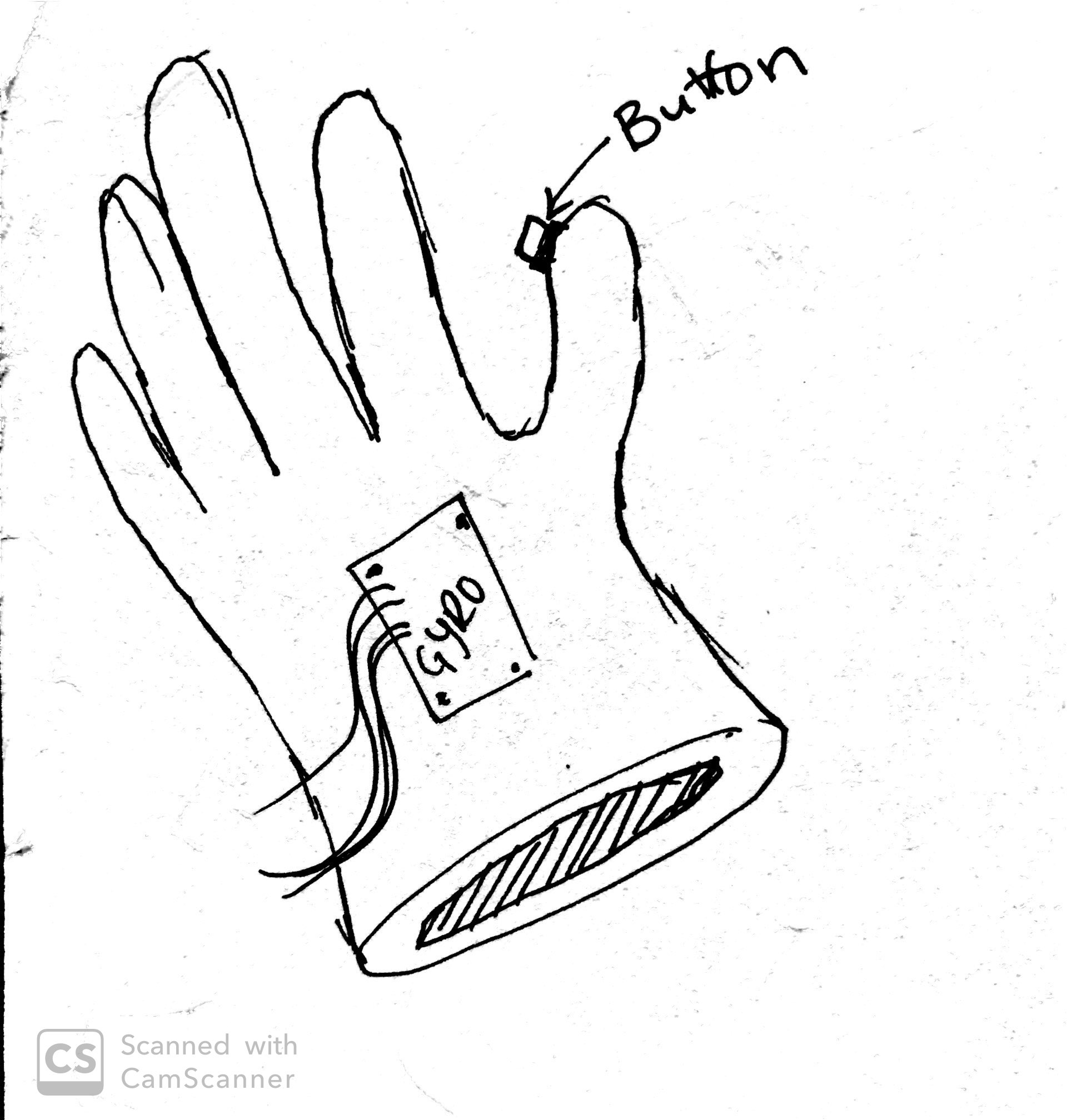
This is the first sketch of the glove, it wasn't anything close to what it is now, but it got the job done just fine.
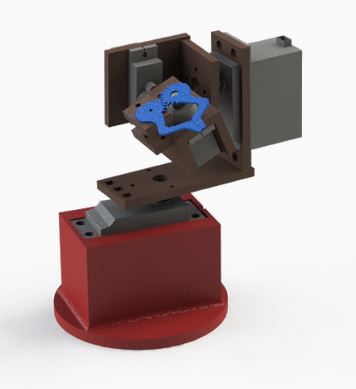
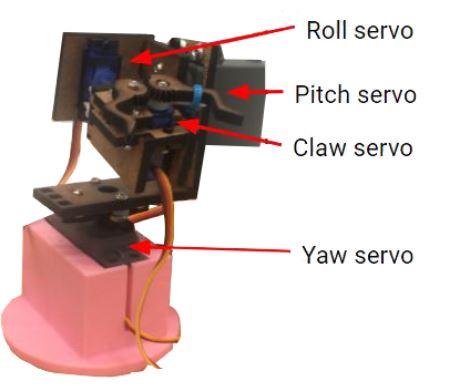
And here is the CAD rendering, and the final product. We were so happy that everything worked and turned out good

We also started doing some research into compliant mechanisms

A RGPT PRODUCTION