The Experience
Gallery
All the different models
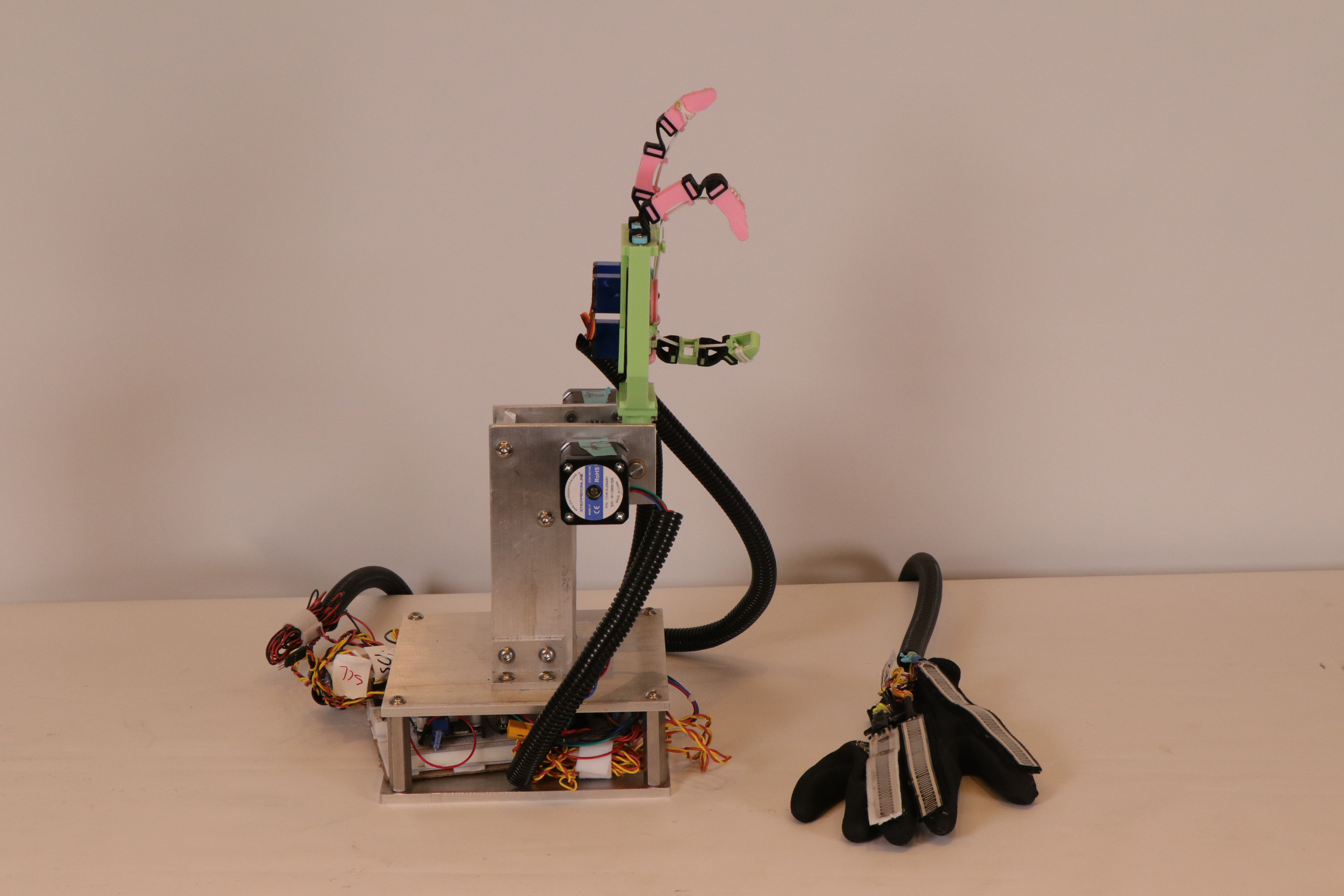
This is Handy, the tele-robotic hand that gets the job done. Handy is the final product of our PoE experience. We could've made anything we wanted, but we chose to make Handy because we wanted to explore a field that was both technically interesting but at the same time could have a real and valuable impact on the world. The applications of tele-robotics are extremely vast, and we originally intended to focus on precise tele-robotics that could be used to preform surgeries. Don't get too exicted though, while Handy is amazing, it doesn't quite have the necessary performance quality for anything more precise than holding a pair of pliers for a few seconds. We love Handy, and hope you do too!
This is a diagram showing how Handy's Mechanical System works! It uses a triple bevel gear wrist actuated by stepper motors to copy the human wrist's roll and pitch and has three compliant fingers actuated by servos integrated into the palm of its hand. If you look at our Sprint 1 page, you can see how we made leaps and bounds with our mechanical design. We decided to make Handy as human as it could be, this is so it can completely mimic it's users movements.
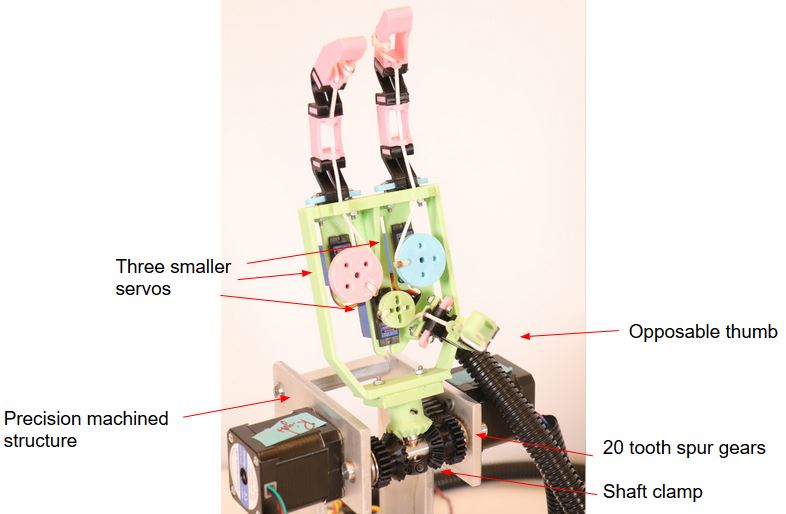

Here you can see a little bit about the compliant mechanisms that went into Handy's fingers. Here is some info from Mason, our resident compliant mechanism expert,: "Replacing hinges with flexures reduced manufacturing complexity by not requiring a hinge assembly, high accuracy machining and string tensioners. Using 3d printers, we were able to iterate on joint designs fast and often. TPU’s ability to squish, bend, and stretch allowed me to design the finger assembly as completely press fit pieces between TPU and PLA. The Final design was in the shape of an ‘X’ (this helps the center of rotation stay closer to constant). While no joints broke during the class, we didn’t do any prior testing to see how many bend cycles they could take."
And now you can see the final glove upclose, we will go deeper into the sensors on it below.

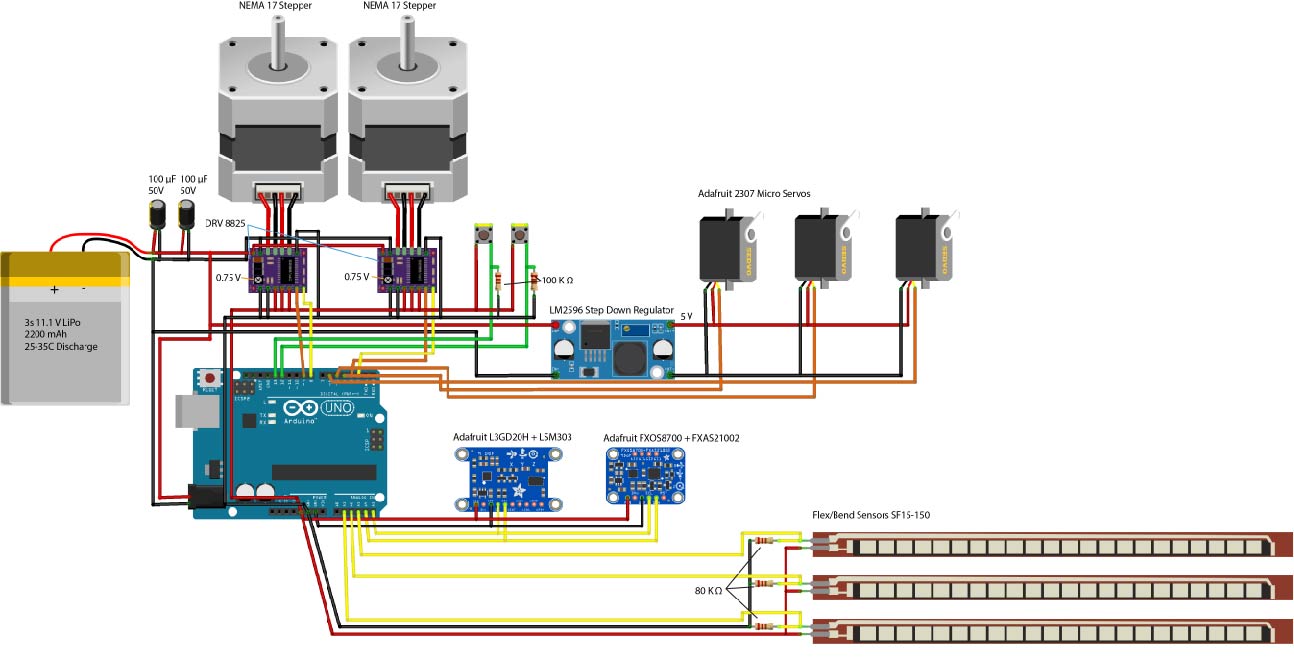
In this diagram you can see the electronics that make Handy mimic your movements. You can control Handy through a glove that is equipped with 3 bend/flex sensors, that measure the bend of your thumb, pointer finger and middle finger, as well as a IMU (Inertial Measurement Unit) that measure the roll and pitch of your hand. In addition to all that there is a button that you can pressure that lets Handy know for sure that your fingers are closed, so it clenches when you do. You can't see the glove in this diagram but you can see all the sensors.
There is also an IMU on Handy that provides consistent feedback, so we can make sure it is always where it needs to be and a button that acts as an E-Stop or a pause button, so the user can take a break from all the tele-robotic fun. You can see that all these sensors are inputted into an Arduino, that then processes the input and updates the stepper motors and the servos accordingly.
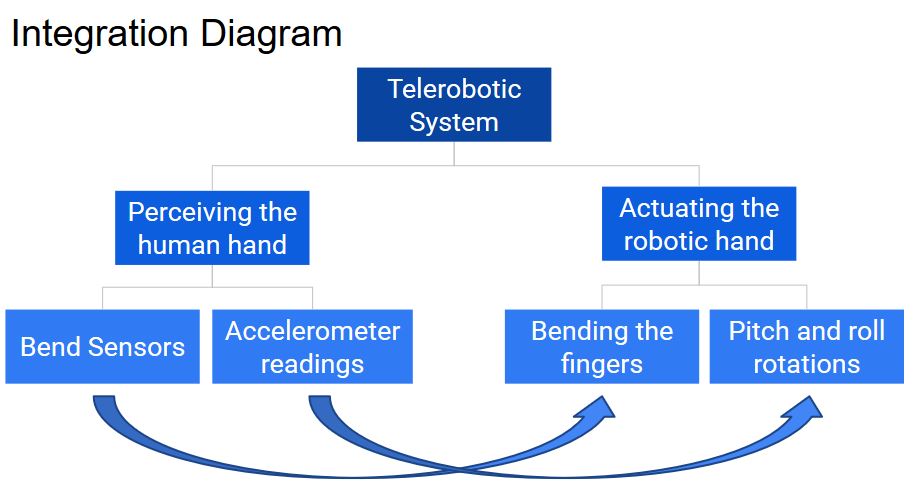
Now, you know what makes Handy, mechanically and elctronically Handy. You can see an overview of how these two systems work together in this diagram, but we are missing one big thing, the code! Due to the length of the code we aren't going to put it on this website, but we do have a Github Repository that we invite everyone to checkout. We are very proud of the software that went into making Handy who it is. We split up the code into 3 main parts: the input from the Human User's Hand, the input and control of the motors in Handy, and a script that puts it all together. Feel free to look into our code more freely here.
Principles of Engineering is a class at Olin College of Engineering that teaches its students about integrated system design. The final project for this class is an 8 week assignment in which a team of approximately 5 students design and create a system that is made of a significant/complex software system, mechanical system and electrical system, all with a $250 dollar budget. To look deeper into our experience through this project, please feel free to look check out the pages available on this site that overview each sprint.

A RGPT PRODUCTION