Overview
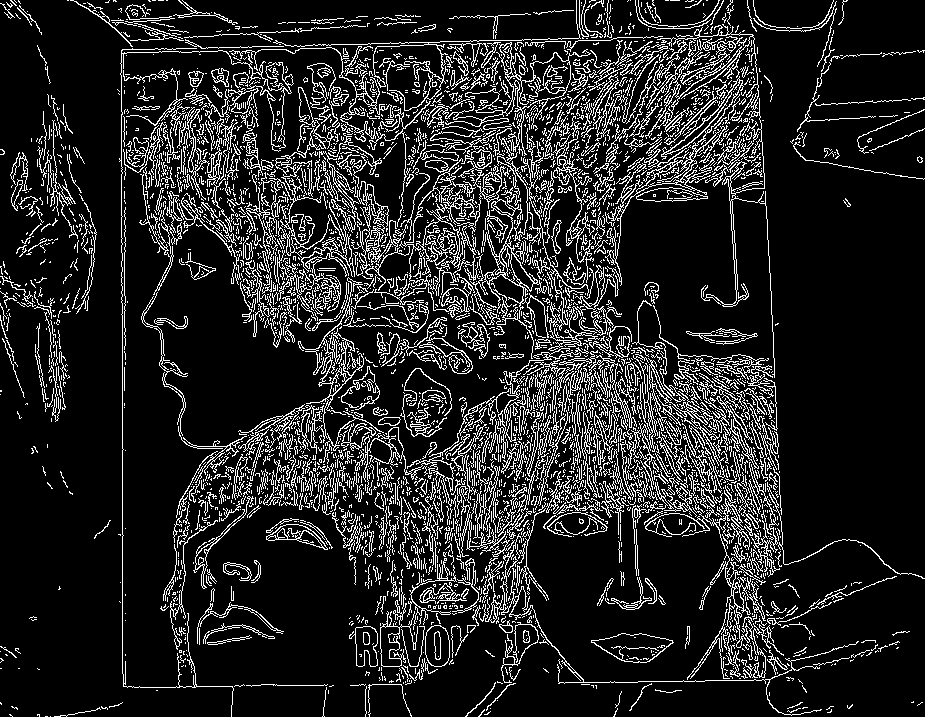
An integral facet of our reach goal was to give the DrawBot the ability to draw pictures it sees in real-time. As a part of this project, we had started working on an algorithm to convert camera captured images into a plot that maps the original image as a single line drawing. This algorithm works by turning the original image into grayscale, halftoning it and then connecting the black pixels with a single line which our mechanism can then draw.
Visit our Github to get access to our code and see the progress we had made.