Sprint 1
Learning Goals.
To begin sprint 1, we discussed our individual learning goals. This was useful in finding a direction for us to take our project. At the beginning of this project, we determined that Andrew's learning goals were to gain experience integrating mechanical, software, and electrical components, and also to increase proficiency in programming. Connor's learning goals were to gain a more well rounded experience, and develop programming and mechanical skills. Grace's learning goals were to learm more about electrical systems and sensors, and to develop new programming skills. Sid's learning goals were to learn more about mechanical systems, and to improve fabrication skills.
Pivot.
We began by creating a flat robot, who's goal is to be able to fold flat and fit in a backpack. We made some sketch models of this using an arduino and some small servo motors. In the project history tab of this website, you can see how that worked out for us. We were able to make a working model very quickly, and then decided that we wanted a more challenging project.
To make our project more challenging, we decided to pivot to a spherical robot. We took inspiration from the robot BB-8 from the Star Wars movies. This presented several more interesting challenges, such as controlling the movement of the sphere externally, finding a driving mechanism for inside the sphere, and finding people and following them.
MVP and Stretch Goals.
After switching to the sphere, we created some criteria for our project MVP (Minimum Viable Product). The two things we wanted the sphere to do was roll in such a way that we can control the movement, and create some sort of beacon that the ball will follow.
For our stretch goals, we determined several other features that we thought it would be cool for our robot to have. One of these goals was for the sphere to find the beacon, even if it was not in a direct line of sight. Another goal was object avoidance. Additionally, we wanted a large range for our beacon, maybe up to 10 meters. Lastly we wanted clean control of the direction and movements of the sphere.
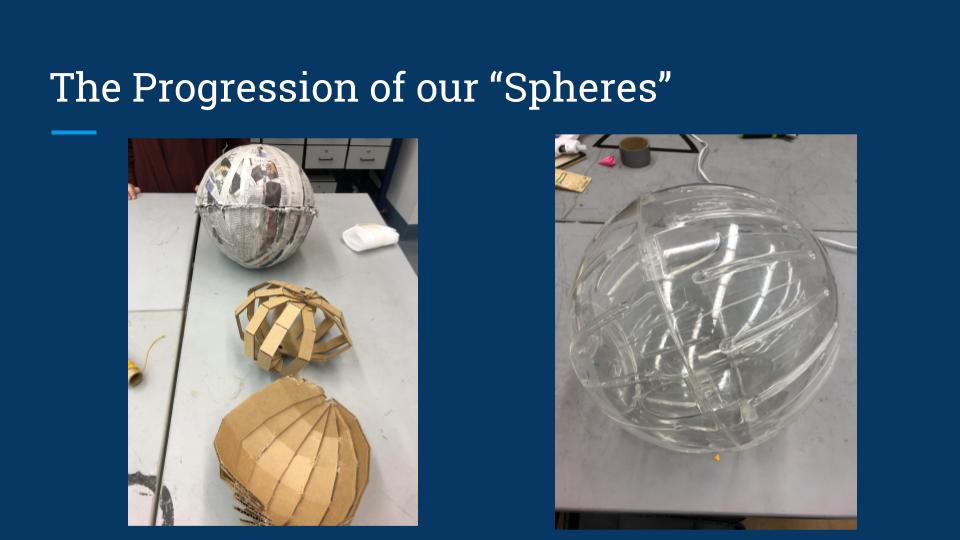
Sphere.
In this sprint, one thing we were concerned with was the creation of a sphere. We began our process by creating cardboard models, paper mache models, and then we eventually bought a hamster ball to test with. The image below shows the progression of our sphere.
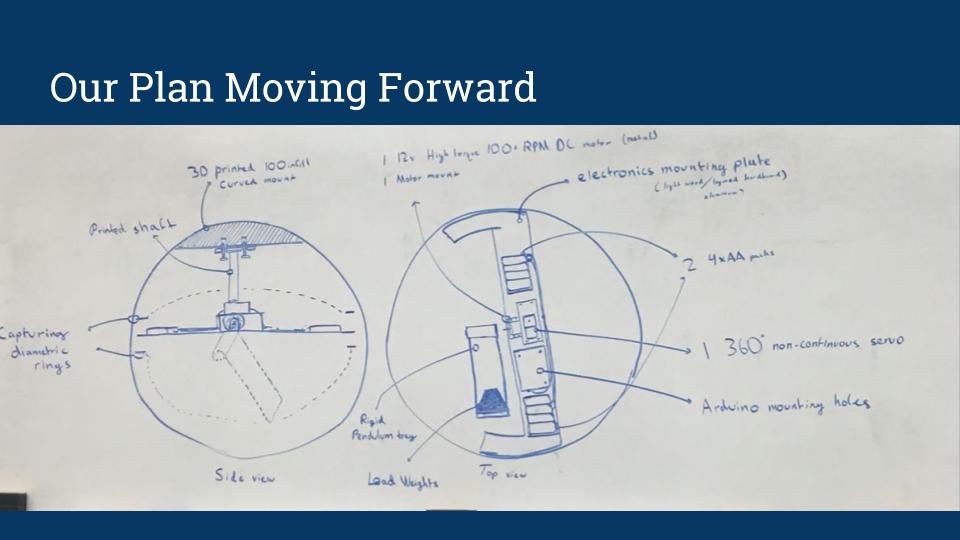
Driving Mechanism.
After the creation of the sphere, the next challenge we had to tackle was how to actually drive the sphere. One idea that we had was creating a pendulum drive and using gravitational force to induce the rolling of our sphere. The diagram below shows a sketch of the design we were planning on pursuing.
State of Project at the end of Sprint 1.
At this point of our project, we had a proof of concept for our project. This is because we spent the sprint making sketch models to validate our ideas of what the project could be. For example we created a sphere out of paper mache and were able to drive it forwards using a wheel based system inside of the sphere.
Towards the end of the sprint, we spent a lot of time working on a more robust version of the sketch model. Instead of using a paper mache sphere, we ordered a large hamster ball and planned to use better materials to make the internal drive mechanism.