Goal
Our sprint one goal was to build a solid, functional two-axis compound table framework capable of traversing the X-Y plane and drawing continuous figures.
Demonstration
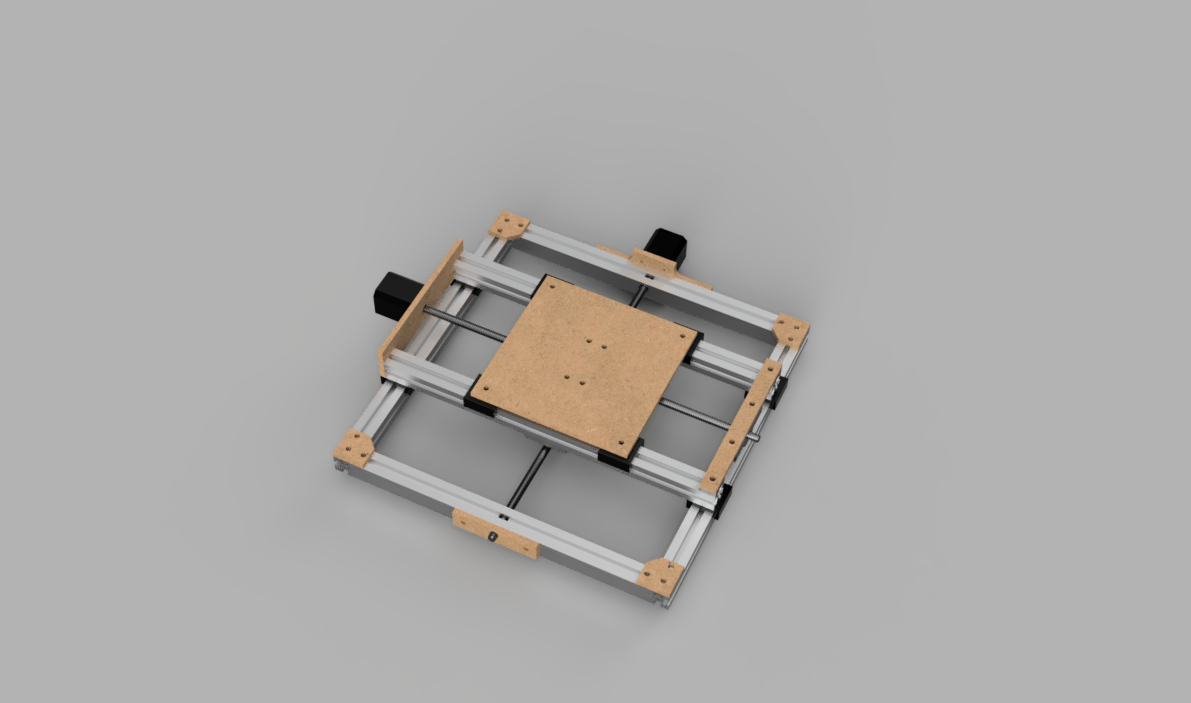
Mechanical
The first iteration of the compound table had a wider footprint and used custom 3D printed sliders as linear bearings on the 80/20 frame members. The lead-screw bushings, motor couplers, and a variety of other parts were 3D printed, and all of the flat components were laser-cut. By using these rapid prototyping strategies, we were able to quickly develop our hardware platform, but most of the pieces did not prove to be robust enough for continued use.
Electrical
In the very first sprint, we prototyped the electrical and controls system for the X-Y compound table on a breadboard. It included:
- A4988 stepper motor drivers
- Arduino Uno
- A 12 Volt Power Supply
- Peripherals for component configuration and power distribution
Our biggest electrical takeaway from sprint one was that the robustness of the entire system is based on properly protecting our components. Just in sprint one, we destoryed two (2) motor controllers and one (1) computer motherboard.
Software
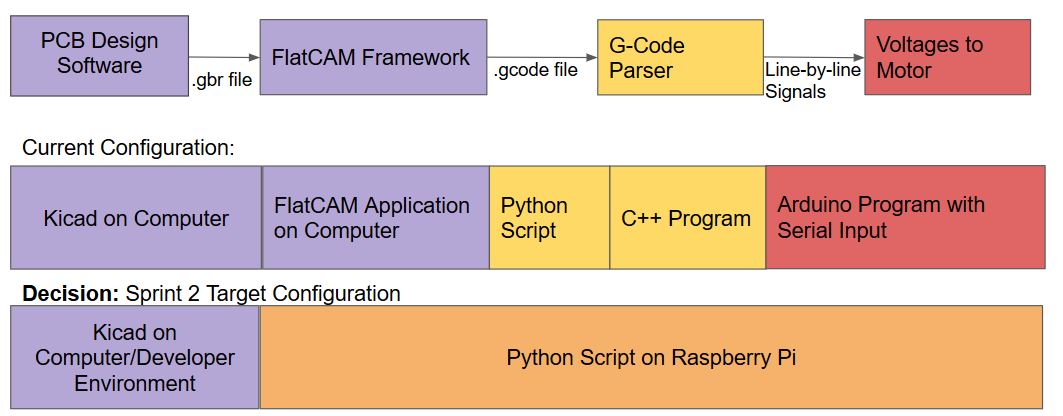
During our very first sprint, we started out writing our own gcode parser compatible with A4988 motor controllers. We were able to cover both linear movement solely in the X or Y direction and diagonal movement that required X-Y coordination. By the end of the sprint, our gcode parser was able to execute the arc command and draw a circle, which requires use of both axes.
Sprint Two Planning
After completing this sprint, our primary concern was how including the cutting tool on the z-axis. So, for Sprint Two we decided to prioritze incorporating and controlling the motor on the z axis.