Summary
In this sprint we fully integrated all behaviors with sensor data and finalized our construction. We ended up with 8 actuating leaves receiving data from 3 photo resistors and 3 microphones. The plant was finally able to actuate the leaves at the same time as running away and processing input.
Progress
|
This sprint we made the light and sound system more reliable. For the sound system, we re-tuned the threshold to make it more robust. For the light system, we realized that 3 light sensors had some blinds spots and would not be able to sense the light evenly around the pot. Therefore, we decided to add 3 more photo resistors.
As we added more light sensors, the system became more complex. Our previous code of the light system needed to be modified to work with the new set up. The formulas to calculate x and y light intensity shown in the diagram work as a velocity vector that determines the left and right wheel’s velocities. We eventually moved the photo resistors higher up in their positioning which got rid of the blind spots, so we switched back to three photo resistors and our old code. |
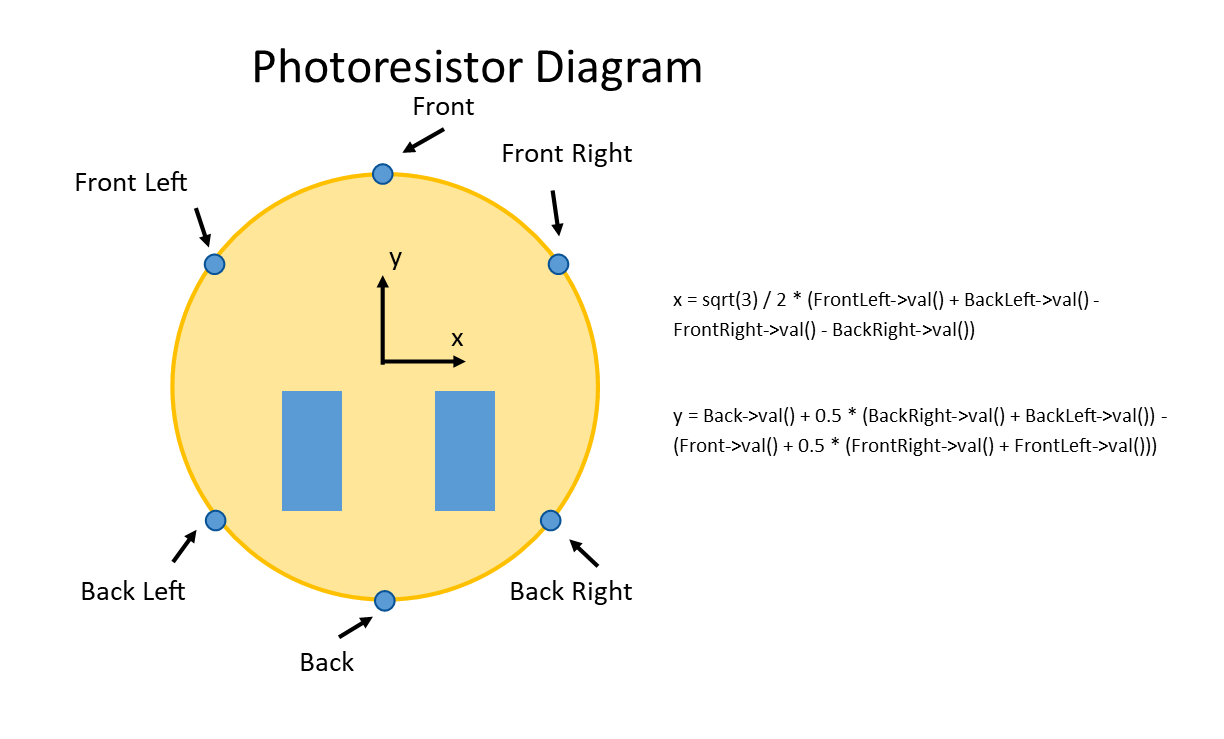
Alignment for 6
photo resistors as well as code to create movement
vector
|
|
|
In this sprint, we also tested and improved the pseudo-parallel code that makes the robot simultaneously run away from sound and pull down the leaves. Our initial attempt was to tell the robot to turn away and pull the leaves down in the first 1.5 seconds, then move forwards and gradually pull the leaves up in the next 3 seconds. This didn’t work well because we had to force the turning away time to be 1.5 seconds, which often was not the case. The turning angle was from 30 to 180 degrees and therefore, forcing the turning time to be 1.5 seconds made the robot behave unnaturally. As a result, we tried another approach. We applied the similar strategy that we already used for the light and sound system and made the leaves shrinking work independently.
|
|
We mounted all four servo mounts to the bottom of the leaf surface, finished printing all the necessary stem parts and servo pulleys and assembled 8 stems and leaves. Once we had the stems ready and mounted on the top of the surface, with the fishing line threaded through to the bottom, we began the process of attaching the fishing lines to the servo hub. Attaching all the servo mounts to the bottom of the wooden leaf surface proved a bit of a challenge. Originally the two mounted servos had the pulley system faced inward, and weren’t well spaced, so we had to pry up the wood glue and rearrange things. Once we had these done, we started putting on the pulley wheels and tying on the fishing line, which got pretty tricky. We ended up making a sort of jig for tying all the fishing lines, consisting of a thick scrap of plywood with a threaded metal rod in the middle to hold the leaf mounting surface. |

|