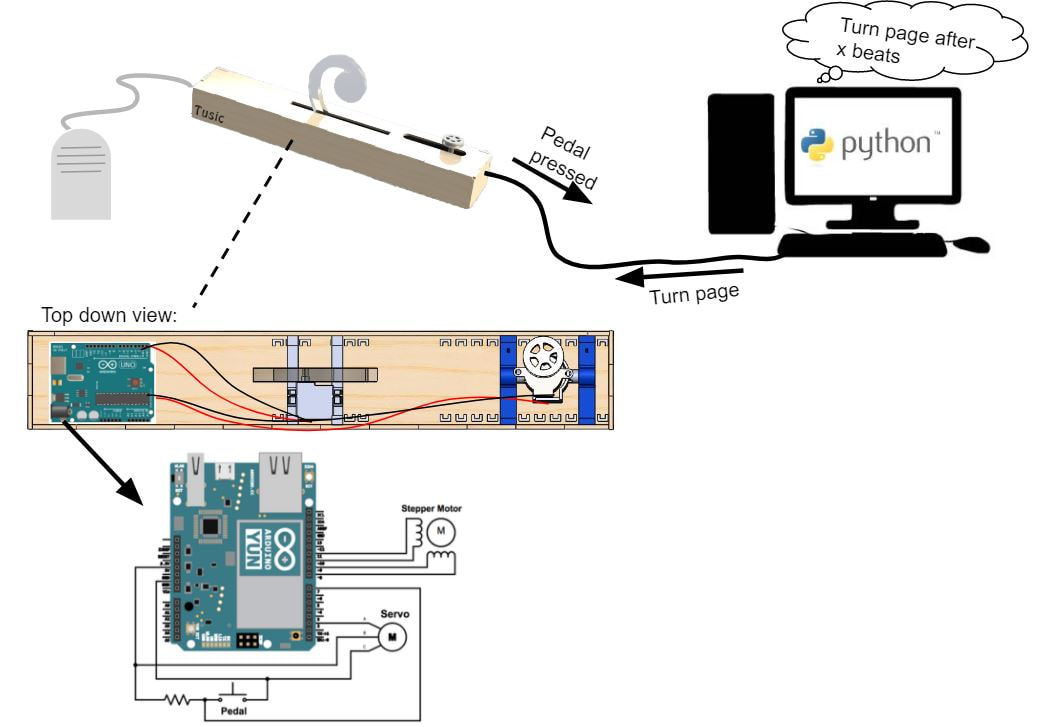
Below is a diagram describing how all mechanical, hardware, and software interact together.
There are five main hardware components to our project: the Arduino, the servo swiper, the pedal, the computer, and the stepper motor wheel. The Arduino is connected to both the servo and the stepper motor and controls when and how they move. The Arduino can be triggered either by the pedal or by the computer. It serves as the intermediary between input and output.