|
Calibration Mode
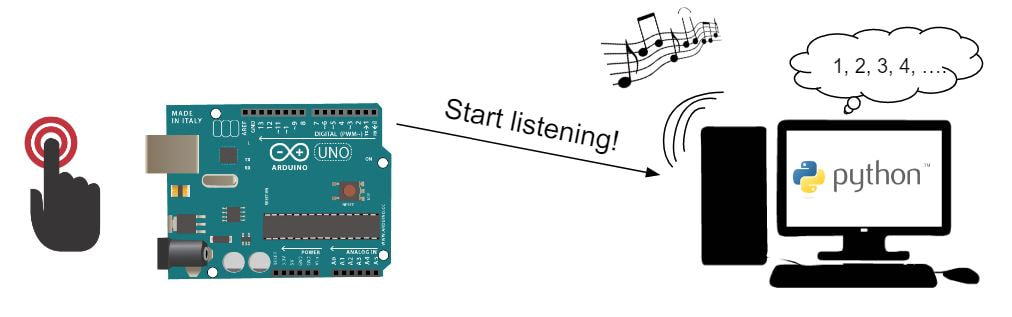
User initiates calibration mode by holding down the button. Arduino
signals python to start listening for and counting beats. 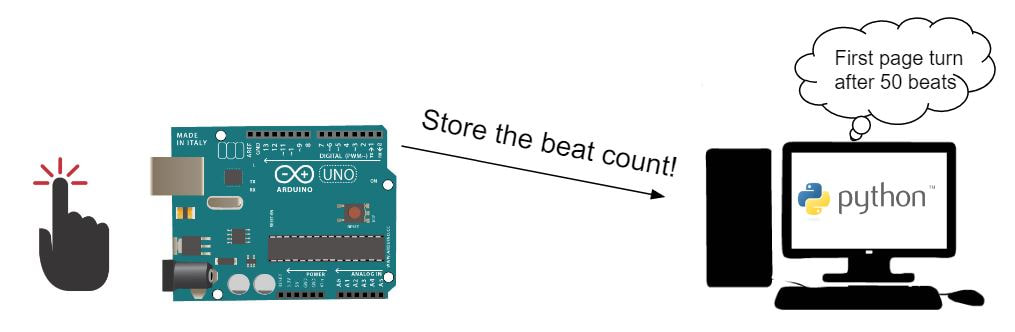
User taps the button to turn the page. Arduino signals python to
remember the beat count at this moment. 
User holds down the button again, indicating the piece is over.
|
Vertical Divider
|
Live-Mode

User presses and holds down the button to begin live-mode. Python begins counting beats, as in calibration mode.
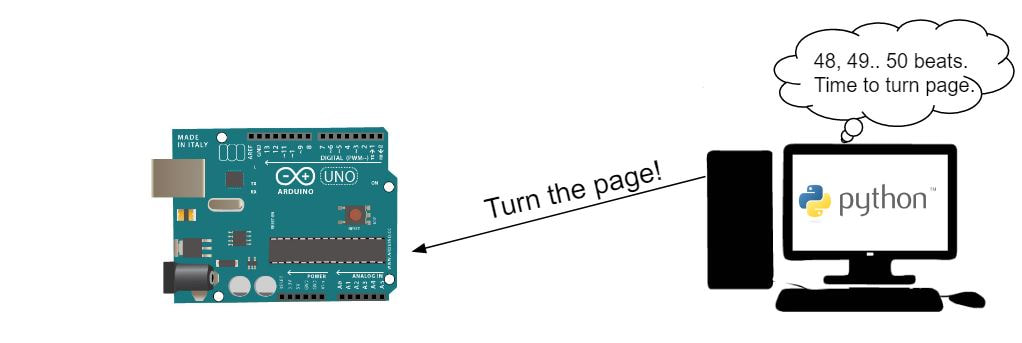
Python tells Arduino when to turn the page based off of the beat count found in calibration mode.
|
