The box system is made up of several main components: the stepper motor system, the servo motor system, and the enclosure. The stepper motor is used to 'roll' the next page up such that the servo motor system can flip the page. Both of these systems sit in an enclosure that holds them in place; the enclosure also provides a space for the music binder to rest on as the musician plays.
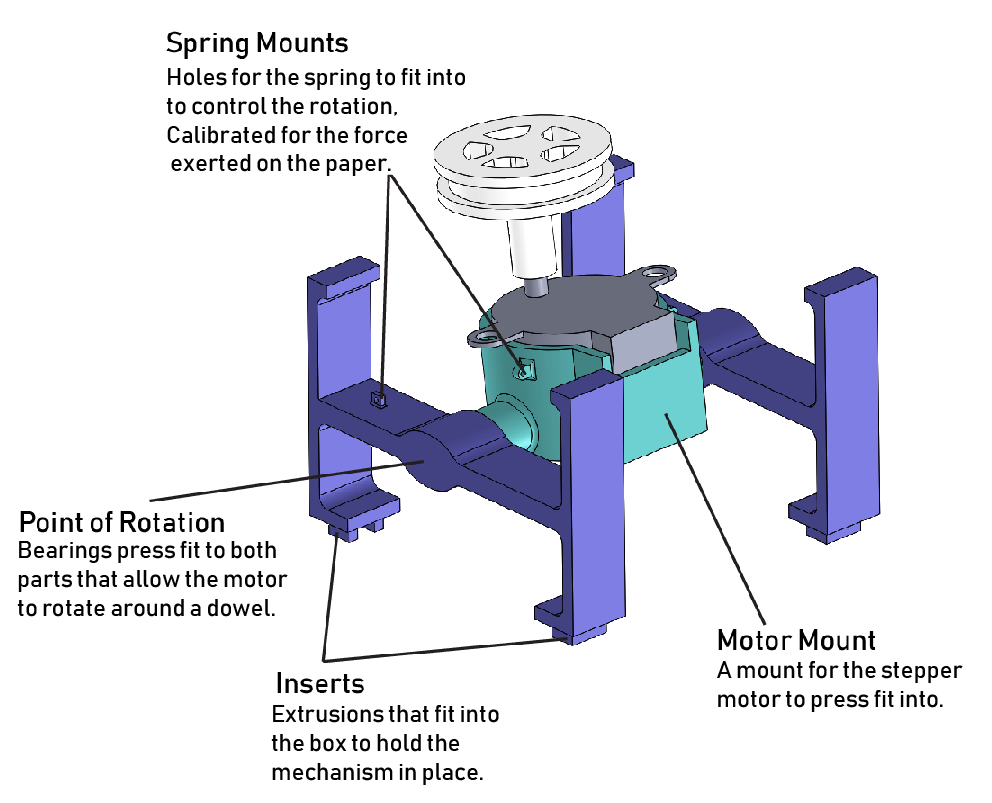
Stepper Motor System: Mount
Stepper Motor System: Wheels
Throughout the project, the wheels underwent several iterations. The first version was 100% 3D-printed and used PLA as a frame and TPU for friction. The TPU did not provide enough friction to accurately move a piece of paper, so we briefly used rubber bands to provide it. That worked reasonably well, but the large size made it difficult to read the music. Additionally, the rubber bands looked unprofessional. We downsized the diameter of the wheel and attempted to remedy the friction problem by adding "teeth" to the TPU wheel. Unfortunately, this still did not provide enough friction. For the latest iteration, we bought rubber rings and integrated them with our old frame. This wheel is much more effective at grabbing onto the paper.
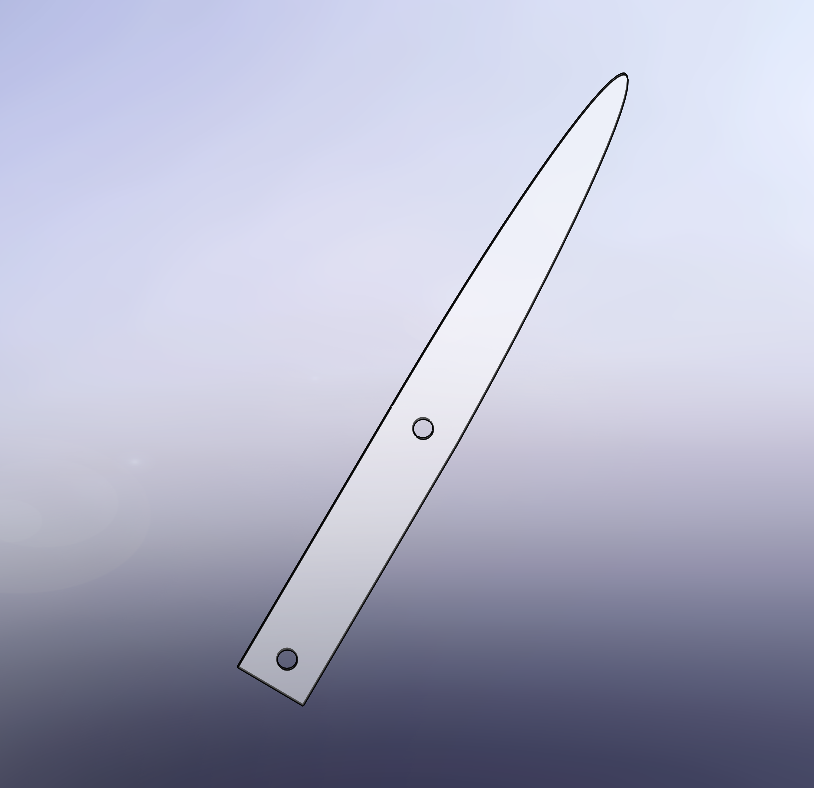
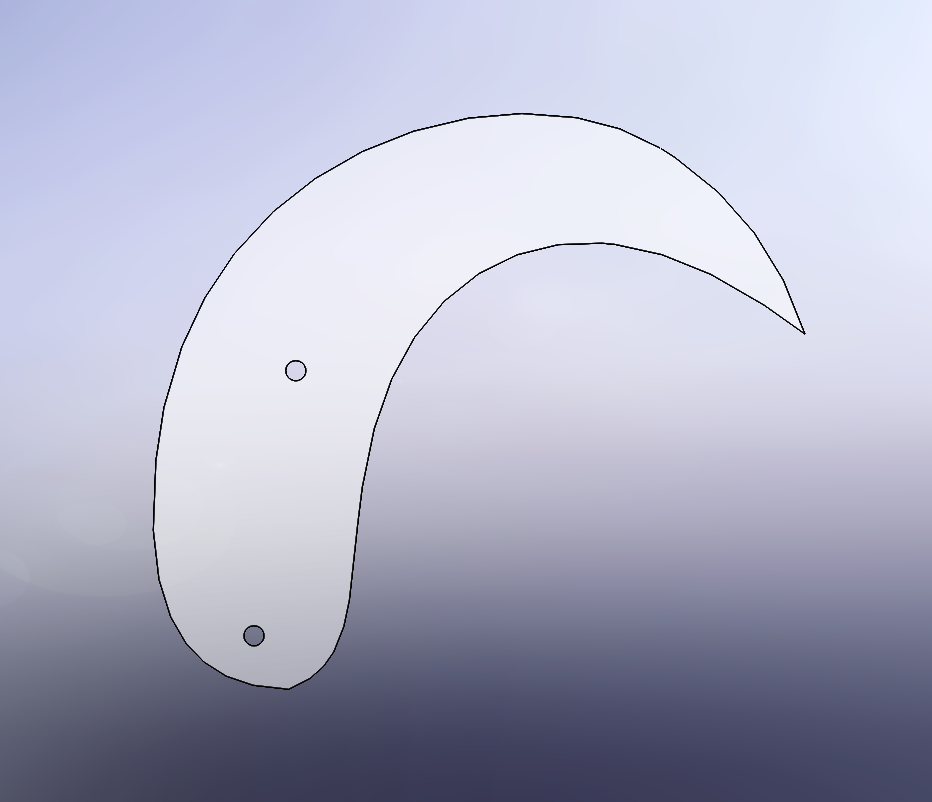
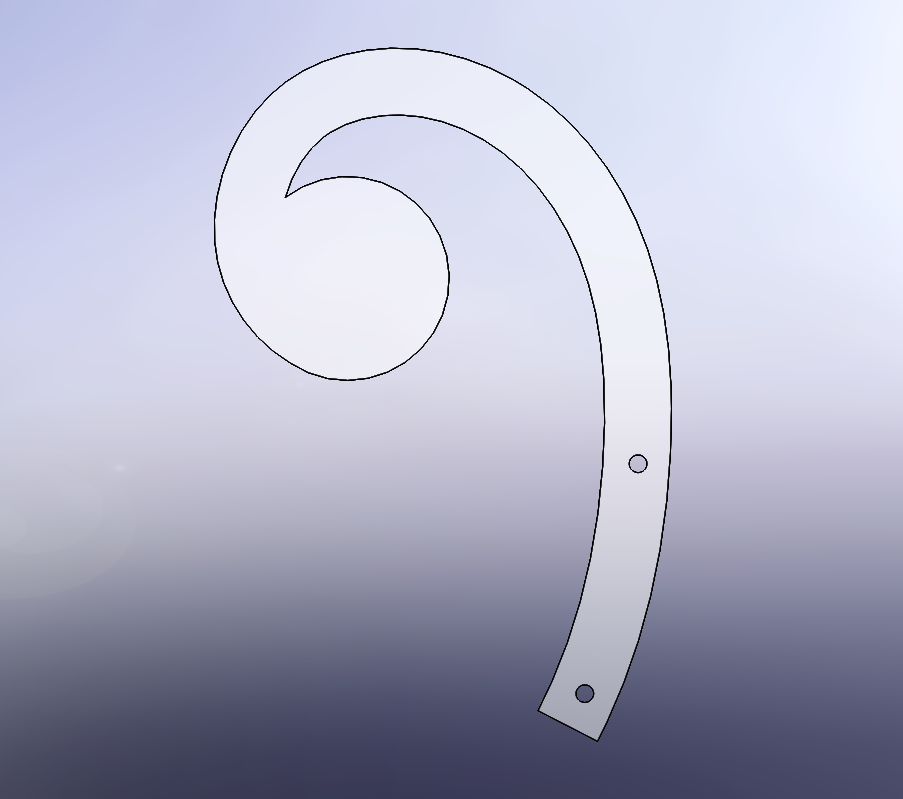
Servo Motor System: Swiper
The middle swiper has also gone through several iterations. At the very beginning, it was a stick of cardboard tied to a servo horn. This evolved directly into the design on the left: a simple, straight stick. Unfortunately, due to its thin nature, it tended to tear through pages it was trying to turn. In an attempt to be stylistic, we designed the middle swiper. The first time we used it, we mounted it backwards so that the pointy end was trying to turn the pages, and we had an even bigger problem with page tearing. Our current swiper is the one on the right, which is both stylistic and curved such that it will not rip any pages it comes into contact with. The swiper is laser cut from acrylic for aesthetic and strength purposes, with holes to connect it to a servo horn.
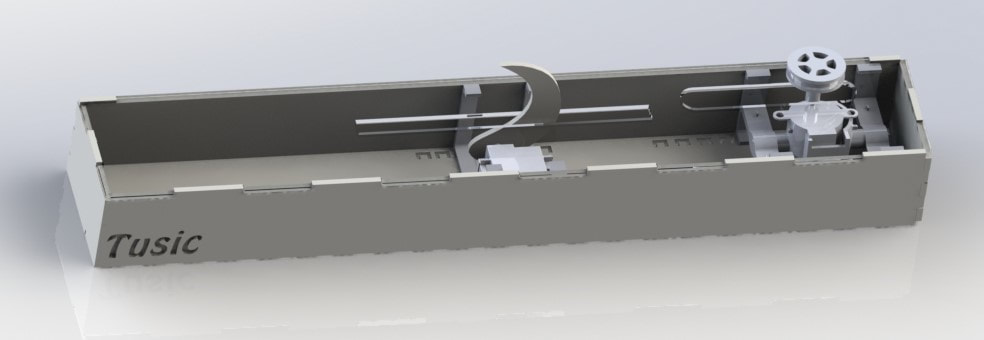
Enclosure
One of the largest design challenges of this project was creating a box that could accommodate the electronics as well as the support the motors. As the designs progressed, they became more flexible so that we could easily test the motors/wheels at new positions. The earliest version of our box, for example, had the holders build directly into the box. The next iteration involved wedging the holders between the two walls of the box. This worked well at the beginning, but as time went on, the force of the holders pushing against the box caused it to come apart. The final design focuses on easy integration between the holders and the box. The bottom of the box features press-fit holes for the holders to sit in.