I Am the Hexbot
I am a happy, six legged, adorable monster set on conquering the world,
|
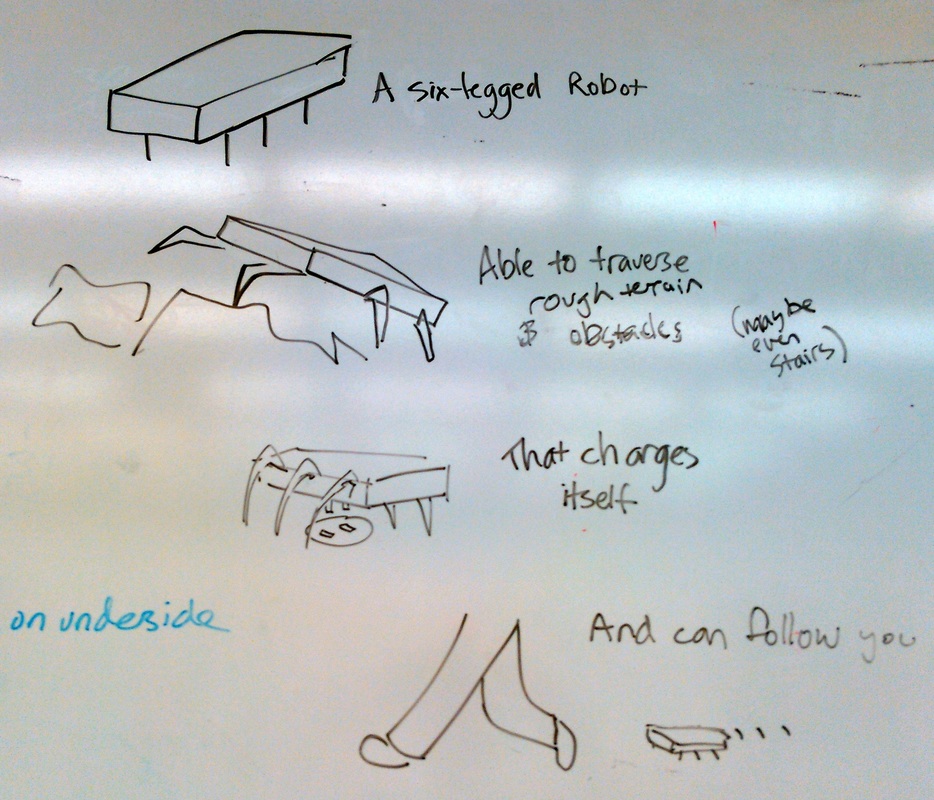
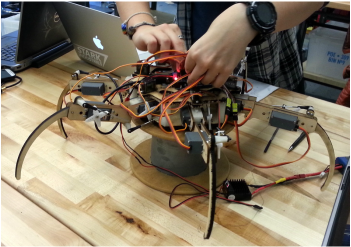
Hey there, I am HExBOT, a HExBOT of the first generation created by a group weird humans. I can walk in a straight line and I can kind of turn. I support all of my own weight including my own battery that can run for a decently long time. I have six legs, each with three segments and controlled by three servos to give me the potential for full mobility in any direction. My legs and body are made of 1/8th and 1/4 inch plywood with 3D printed attachments, plastic servos and metal screws and joints. I am powered using a lithium polymer battery and controlled using an Arduino, a RaspberryPi, and a computer running ROS. My group of humans has a plan and potential code for enabling me to climb things, and walk anywhere but aren't quite there yet.
To read more about how I got to where I am keep reading below for my story. The entries go from earliest to latest. By the way, HExBOT stands for Humans Excelling By Olining Technology Stuffs. |
I am a happy, six legged, adorable monster set on conquering the world,
|
Hi, I'm ME!
My ultimate goal is to conquer the world but I'll settle for being able to walk anywhere. Preferably without a tether but we'll see. The people who think they control me and are doing me the favor of building me have a list of things they want me to do. Maybe you can find it somewhere below, if they've gotten to it... they're easily distracted sometimes, although the write it off as being "busy" and "working". Yeah right. All I know is that they're taking way too long to program my legs. Right now I still only have one and it's not even working. They've promised me another one by the end of Sprint 1 but I really need six! I'll keep bugging them though, no worries. I'll be able to come find you soon!
|
|
THOSE HUMANS MADE PROGRESS
|
No really they did, the math behind me is really complicated, with lot's of look up tables to keep my arduino from being overloaded. My legs are now being powered by two different types of servos attached to an Adafruit motorshield with 16 servo connections so there will hopefully be no need to use a breadboard. I still only have two legs but they're both moving and starting to be calibrated so that they move where I am (or rather my Arduino is) telling them to go. My humans are also printing 3D parts to keep my legs from being as unstable as they are right now. This way not so much of the work I'm doing is being lost to my legs not moving. They also found a battery that they will hopefully be able to power me with so I wont have to be attached to a tether. I'm a HExBOT not some dog who needs a leash!
|
|
I CAN STAND
|
I now have six legs, and as of this morning I can stand! Those humans have been spending increasingly periods of time and the attention has been really nice. They don't seem to be very good at picking up hints though. I may be breaking some of my joints kind of on purpose to tell them that they're not strong enough but they haven't replaced yet... are these humans dense or just slow? I don't know, maybe they have other reasons too? Nah, never mind, they're just lazy :D
|
|
|
STRONGER LEGS HERE I COME
|
I guess I do have to give "those humans" my creators, a little bit of credit. They got the hint that I needed a stronger leg design and are now reassembling me with said stronger legs.They have also been adding a Raspberry Pi, Python , and ROS to my brain which is really great because it enables me to actually do my own math instead of just looking up things on a look-up table. At this point it seems like by the end of this project I'll only be able to walk forwards and maybe turn. They all want to keep working on me though which is really exciting. I'm not ready to be thrown into the big bin of abandoned projects. The rumor is that once you're in there you never return and get covered by banana peels, abandoned pink foam with hot glue, and lot's and lot's of sticky notes.
|
|
I CAN WALK
|
As of yesterday, the great day of December tenth in the year two thousand and fifteen, I, the greatest HExBOT in existence, can walk. I will admit that I'm still a little shaky, and unsteady on my legs. But! I'm getting better by the day! Very soon I will CONQUER THE WORLD! The humans are still working on making my programs better, making me more stable, and finding a surface I don't slip and slide on but all in all, I'm feeling pretty good about myself. Hopefully I'll get better at this walking thing fast though. I would be really embarrassed to be stumbling like this at EXPO. You hear that humans? I do not want to embarrass myself in front of all of those people.
|