Final Product
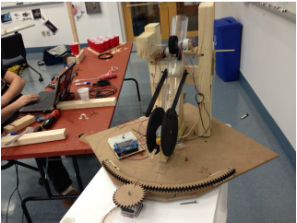
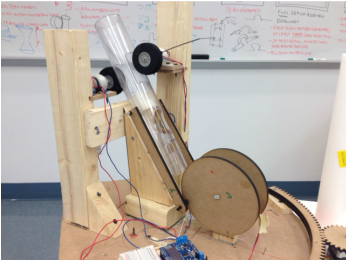
Figure 1. This figure is a rear image of our final Pong Bot Assembly
|
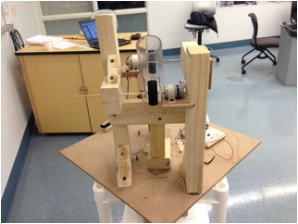
Figure 2. This figure is a front image of our final Pong Bot Assembly
|
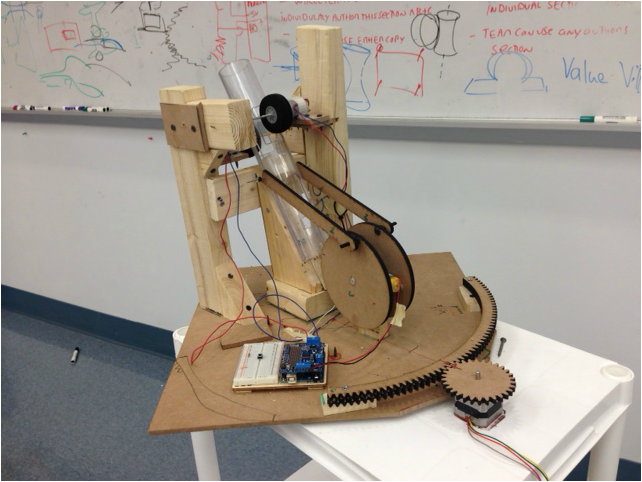
Figure 3. This figure is a side image of our Final Pong Bot Assembly
|
The Budget:
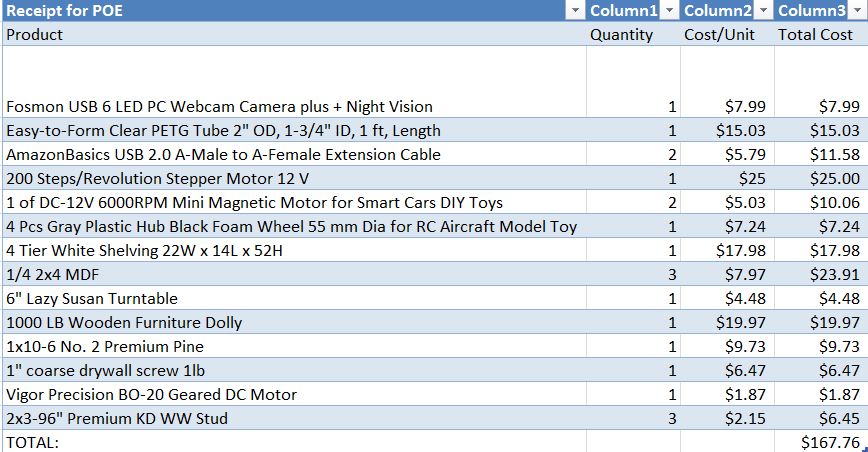 Figure 4. List of expenses to make the Pong Bot
Figure 4. List of expenses to make the Pong Bot
The total budget that was allotted for this class was $250.00 USD to cover materials, supplies, fabrication and shipping. In order to make this project similar to a professional project with hard deadlines, a budget and a time limit.
The Microsystems:
Linear Actuator/Launcher
|
The linear actuator converts rotational motion to linear motion to move the ball from the magazine to the pitching motors. The way it does this is due to a DC motor which rotates the two wheels and coverts that motion to transnational motion which is expressed by the two rectangular rods connected by a 3D printed ping pong ball holder within the tube. Then, the pitching motors convert rotational motion of the wheels into kinetic energy in the ping pong ball as seen by the two tires which will launch the ping pong ball.
|
Pan Mechanism
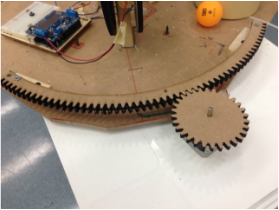
The Pan Mechanism uses a stepper with 200 steps/revolution (1.8 degrees/step) to rotate the system. We then geared it up at 6:1 meaning we have 6 times the torque, as well as more fine control at 1200 steps/revolution (.3 degrees/step).
OpenCV
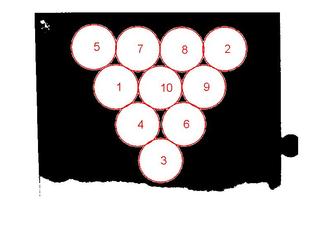
Basically, openCV we used is detecting circles. We can put the size and color we want to detect. In order to distinguish the cups, balls and a table, we needed to set all cups white (inner surface, upper view), all balls orange, and table black (doesn't have to be black, but dark). After we take a picture of cups on the table with webcam, open CV distinguishes the cups and balls by size and color.
Did we satisfy our goal?
The goal of our final project is to create a water pong robot system that can accurately launch ping pong balls in a desired cup and consistently do this into all the different cups.
At current state, the goal statement is satisfied in a way that only some of the fired balls land in the actual desired cup. It can however be stated, that there is a significant accumulation of impacts in the close surroundings of this cup. This is due to the fact that the distance between the individual cups is considerably small. The system is currently being upgraded in order to erase these precision issues.
At current state, the goal statement is satisfied in a way that only some of the fired balls land in the actual desired cup. It can however be stated, that there is a significant accumulation of impacts in the close surroundings of this cup. This is due to the fact that the distance between the individual cups is considerably small. The system is currently being upgraded in order to erase these precision issues.
To use our system, load a ping pong ball into the robot. The linear actuator will push the ball into the launching mechanism. The two spinning wheels will grab the ball and launch it with a calculated velocity. The ball flies through the air and lands in the predetermined cup with an error of about 1 cup.
Video Demo of our Pong Bot
Further Improvements
Further improve robot accuracy.
- Redesign and build custom pitching wheels to provide better grip.
- Design proper motor-to-wheel axle connectors to reduce wobble
- Convert all wood components to metal
- Develop a full User Interface
- Add WiFi communication for Robot to computer
- Develop Mobile Application to replace computer
Source Code
You can download our source code here.