Our objectives for the DotBot are...
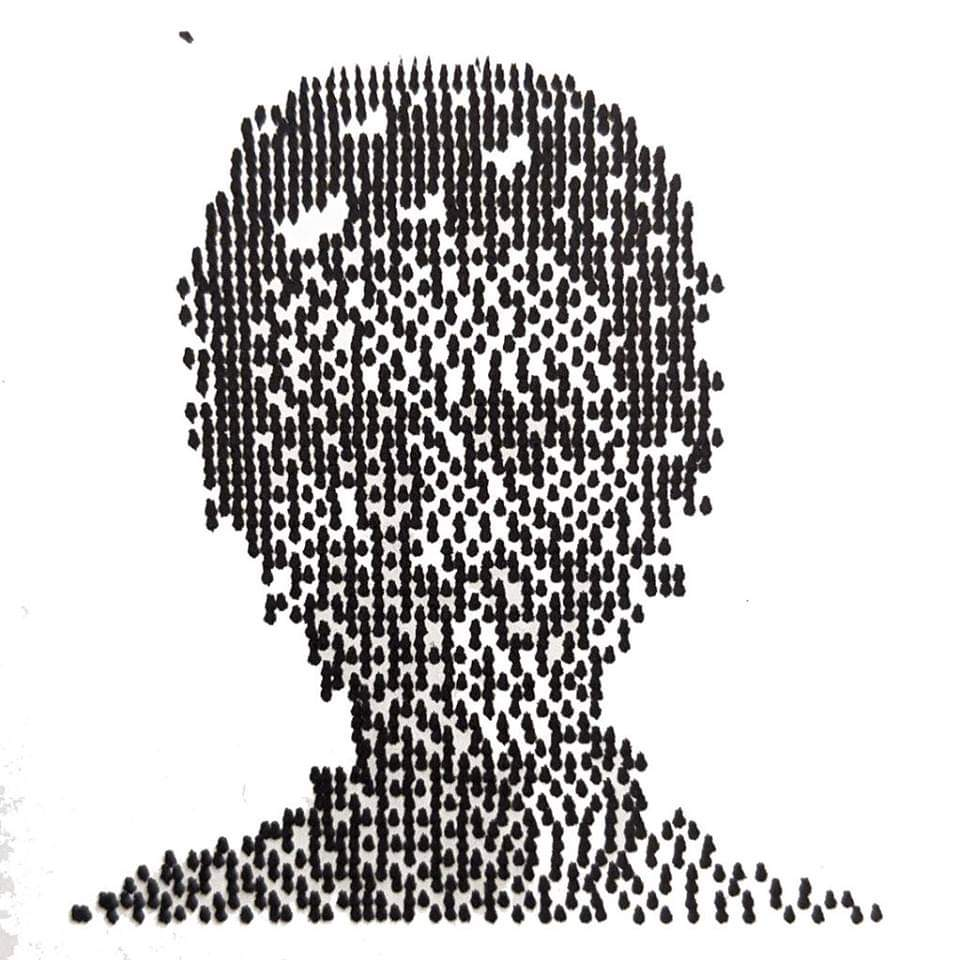
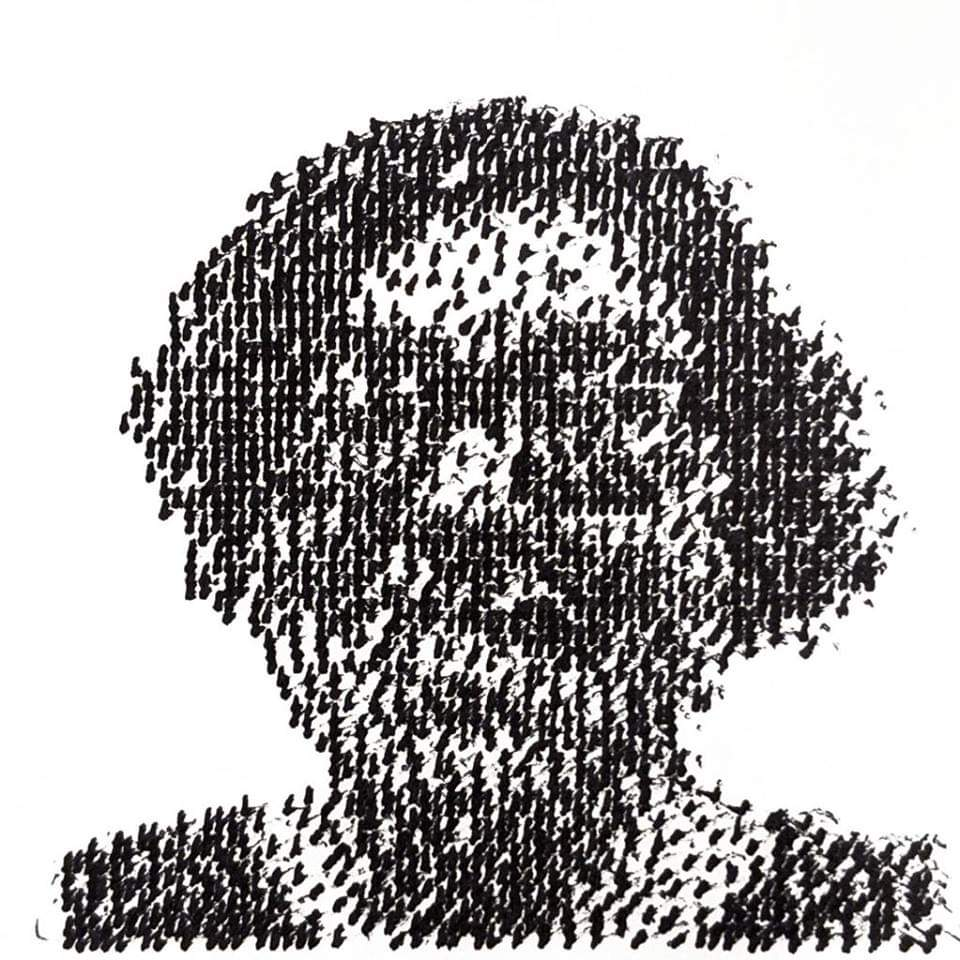
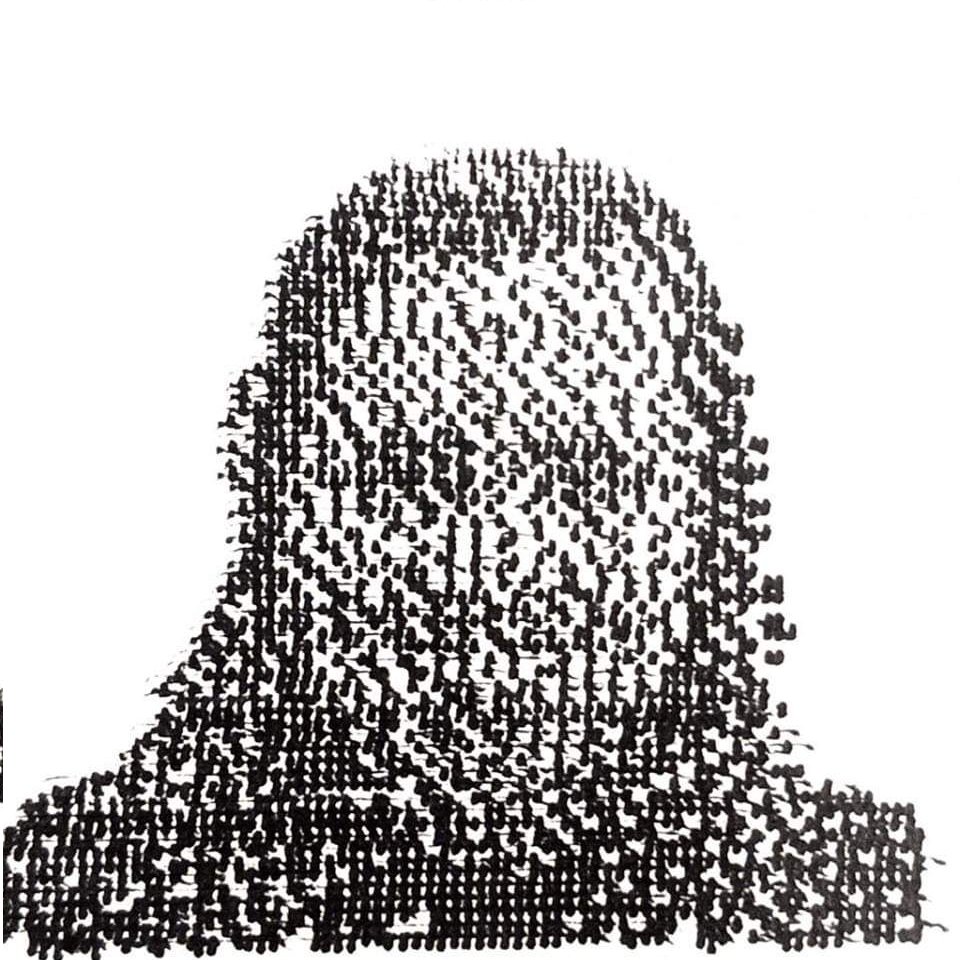
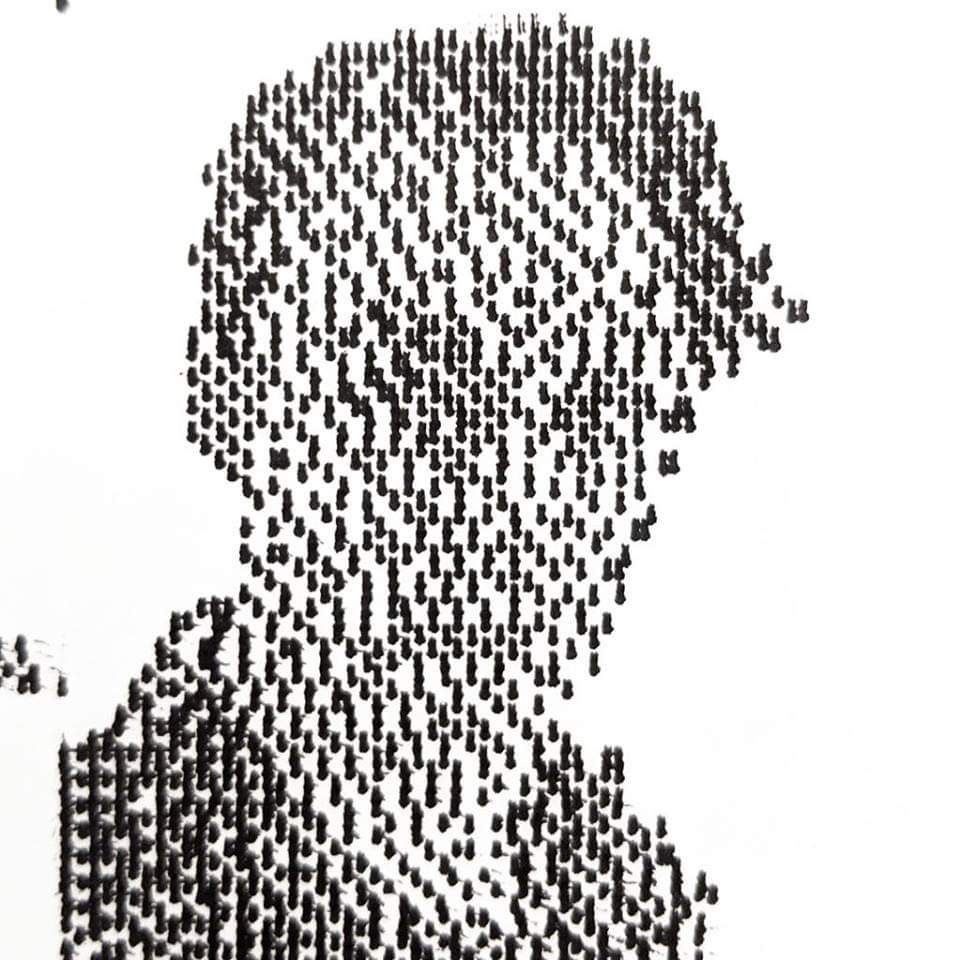
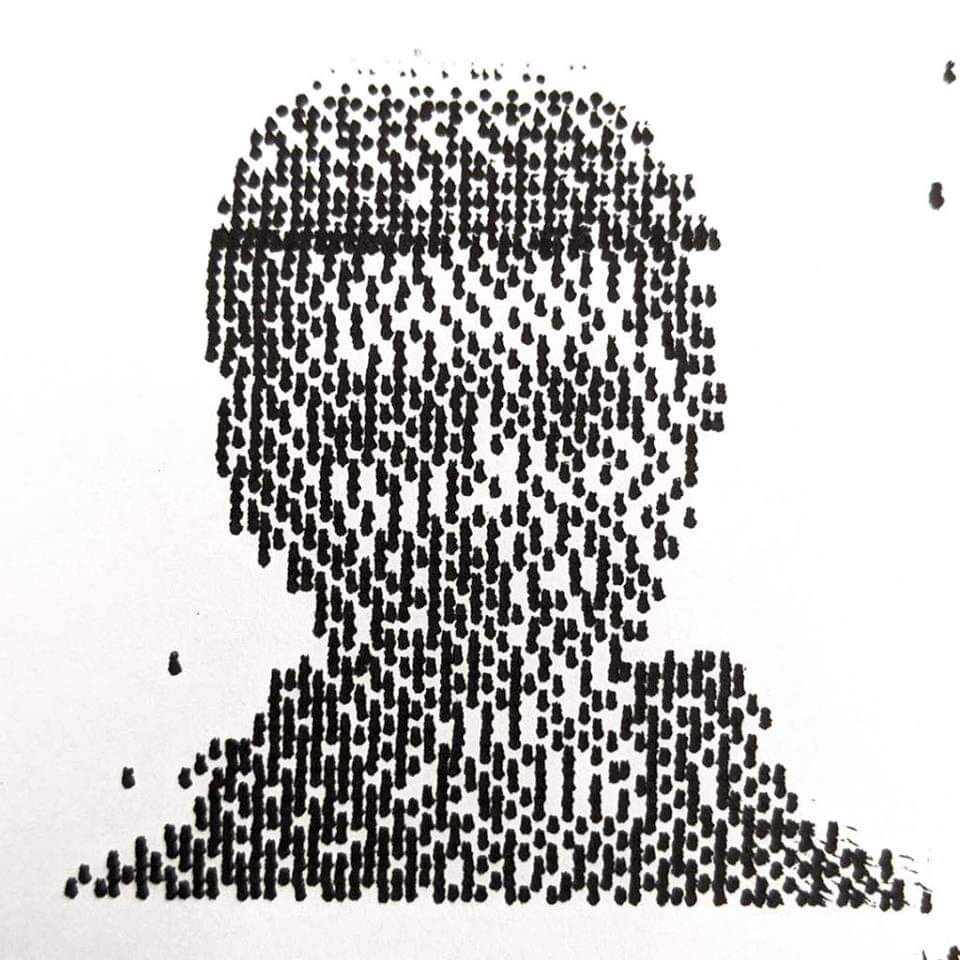
A dithering algorithm is used to convert a full-color image to a matrix of black and white pixels. The coordinates within this matrix are fed to the machine, and the pen moves to draw each black dot.
There are no 3D-printed parts on this machine, nor any telltale "hot glue and cardboard" signifiers of prototyping. This machine is a finished product, and as such, looks finished.
The DotBot creates pictures at a consistent dot-to-time ratio, and will rarely (if ever) stop working. Machined parts are measured and crafted properly, and software is clean and efficient.
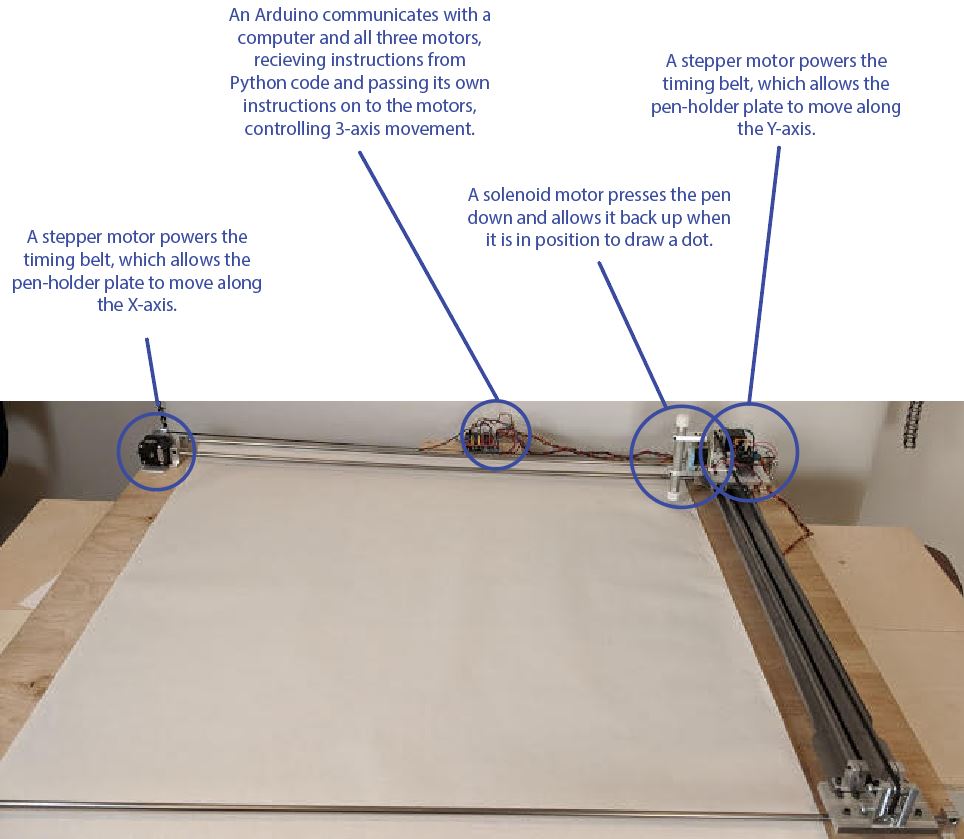
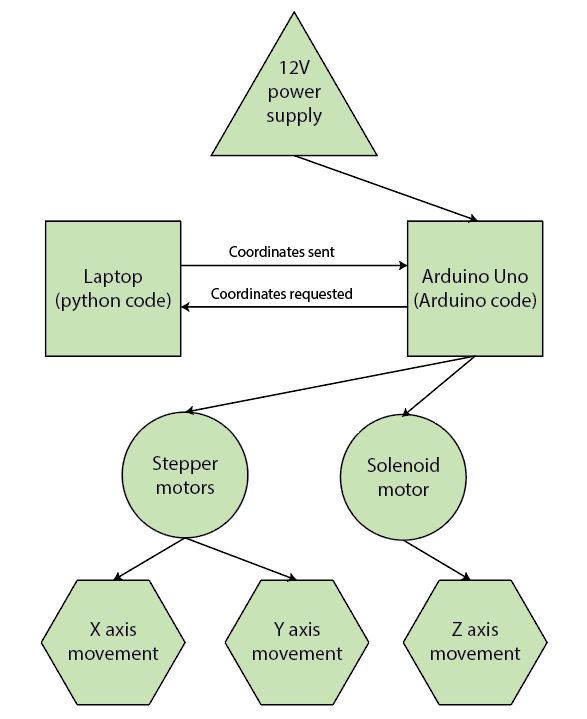
A look into the full DotBot system.
We are a team of five second-year engineering students at Olin College of Engineering.

Carlos got a little lost and somehow
ended up touching and working on electrical
components for this project, learning about
stepper motors and solenoids. He still hasn’t
forgotten his MechE roots however and helped
design and fabricate the gantry.

Eriel wore a few hats during this process.
Although most confident in her software skills,
she wanted to learn about CAD so assisted in
mechanical design during the first sprints. She
then switched to a software focus, mainly
working on Arduino-Python integration and
project website construction.

Gail took on various jobs on this project.
She worked first on the mechanical
system, designing and fabricating the first
iteration of the pen holder, and timing belt
clamps. She then focused her efforts on
fabrication, and trying to wrap her MechE
brain around wire management.

Robin designed the mechanical system while
also working on CAD and fabrication. He ended
up making the solenoid circuit and fixing it
every time it got unplugged for mechanical assembly.

Sander led the software subteam. He implemented
the dithering algorithm, as well as the rest of
the image processing. He contributed to the arduino
motor and solenoid control code, the coordinate
packaging and distribution functions, and the
graphical user interface.