
|
|
For the final sprint we were confident with each component working individually. So our main goal was to be able to bring it all together. We also had to finalize our design as wanted to have our first fully functional prototype here. In our long team bonding/aesthetics/catch up meeting we ended up having some general decisions about our designs. They mostly aligned with our goals so we wanted to accomplish these in the upcoming sprint. with Some of our goals we were able to achieve:
Implementing multiple sensors with different chord ‘modes’ for each one
All components playing simultaneously
Introduce materials and models for our final prototype
Polish motor behavior and link to bpm
Loop fluidly between percussion components
While we worked on most of our goals we also had some ideas that we liked but ended up being unsure about if we had enough time to achieve them. These became our stretch goals that we wanted to finish for the end of the project:
Implementing ‘string sensor‘
Make electronics more aesthetically pleasing and connected better
Our biggest goals was for people to be able to play with our instrument during the sprint review. It was important for us to get peer feedback so we could make it as user friendly as possible for the final presentation. Since we were confident in where each part stood individually we did not
Implementing multiple sensors with different chord ‘modes’ for each one
All components playing simultaneously
Introduce materials and models for our final prototype
Polish motor behavior and link to bpm
Loop fluidly between percussion components
While we worked on most of our goals we also had some ideas that we liked but ended up being unsure about if we had enough time to achieve them. These became our stretch goals that we wanted to finish for the end of the project:
Implementing ‘string sensor‘
Make electronics more aesthetically pleasing and connected better
Our biggest goals was for people to be able to play with our instrument during the sprint review. It was important for us to get peer feedback so we could make it as user friendly as possible for the final presentation. Since we were confident in where each part stood individually we did not
Designs

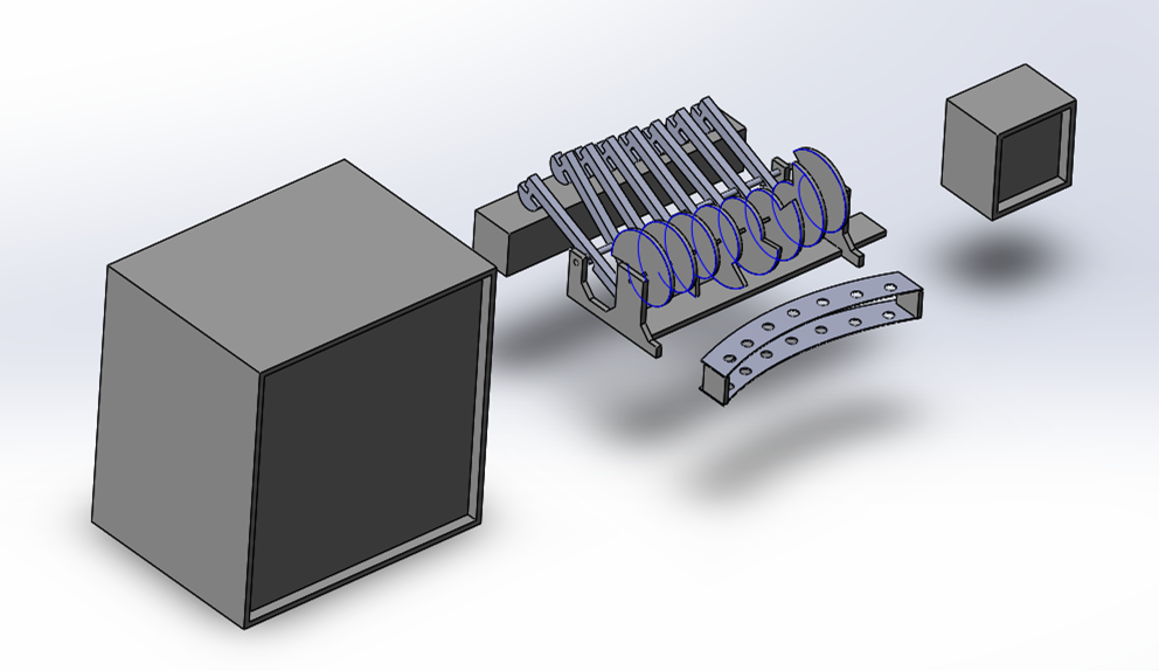
For Sprint 3 we prototyped several design changes and additions to the camshaft system. First, we printed more cams and glued them together to create thicker cams which would prevent slippage between the cams to the lever arms. The resulting cams now had four times the thickness. Next, we designed new lever arms in the shape of a battleaxe to be more accurate in their percussion and more aesthetically pleasing. We also wanted to design an elegant way for the user to customize the camshaft rhythm by quickly engaging and disengaging some or all of the lever arms. In this sprint we tested two designs: first, a slotted lever arm that could be manually removed from the axle, and second, a system of strings and hooks and loops to pull the lever arms upright so that they could not interact with the cams. Ultimately both of these designs failed, but the second led us to our final lever design.
In this sprint, we set out to make the drums loop much more fluidly. To do this, we changed the way the drums would loop. Previously, we looped based upon time, which often felt out of sync with the mechanical drum. However, for the new implementation, we changed it to loop based upon the encoder values that the motor was giving. This way the solenoid drums will always match up with the mechanical drum, and gave an additional benefit of speeding up the looping when the drum is sped up.
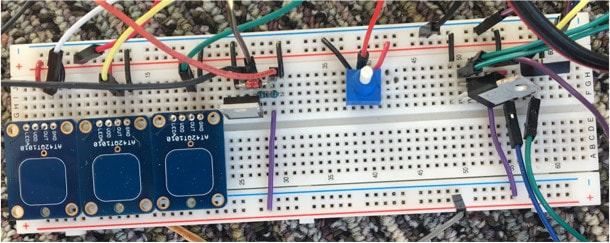
Also in this sprint, we switch the pushbuttons out for capacitive touch sensors. These make it easier to keep time with the spinning drums as it has a more instant touch that the user doesn’t have to push hard to activate.
Also in this sprint, we switch the pushbuttons out for capacitive touch sensors. These make it easier to keep time with the spinning drums as it has a more instant touch that the user doesn’t have to push hard to activate.

For the Electronic Melody, our biggest achievement this sprint was creating the circuit for all seven range sensors. We also changed the sensors so instead of playing a single pitch they now played chords. This way the user did not have to perfectly balance their hands between 4 sensors to play chords. We also designed a mount for all the sensors something we wanted to have for our final design. Hiding all the wires made the entire system look more presentable.
When it came to present in our sprint review we had some technical difficulties. Although we had play tested just an hour ago, the system was buggy but was able to play a song. Thus, we ended up failing our major goal for this sprint which was for our classmates to give us feedback after playing the instrument. However, we had an interesting idea after the class. We always thought of P.I.E. being a stationary instrument that sits on a desk but Daniela gave us the idea of making the entire project integrated into a rolling cart. With this in mind, our final task for the next sprint was to combine all of the pieces into a unified product.