Evolution of Mechanical Systems
Follow the evolution of our mechanical systems through our project!
Follow the evolution of our mechanical systems through our project!
Our sprint one robot was built purely as a platform to test integration. It was not robust or made to last, and little design choices were put into it. It was, effectively, a platform on wheels. The robot was made of cardboard, because we could easily find scrap cardboard to mess with, the motors were just the first ones we could find, and the wheels were made to look cute, but not be effective at being wheels.
The platform did have holes cut exactly to fit the Arduino and the breadboard, which was nice, and laser cutting meant we did not have to worry about tolerancing or the time it will take to manufacture it. We gave it a “cute” design, but
it
wasn’t specifically inspired by anything. The robot performed how we wanted it to, but having it made out of cardboard was concerning, and we wanted to look at what motor options we had.
We started sprint two by sitting down and discussing what we wanted our robots to look like. We decided that creature inspiration could lead to really cute and fun designs. We then decided what creatures we would want to use to inspire our designs. After making a list of around 40 creatures, we decided that the dragon, bee, armadillo, and hedgehog would be the creatures we base our designs off of. Everyone seemed most enthusiastic about the dragon and the bee, so we decided to stick with those two creatures to start. We had a ‘homework assignment” for everyone to come to the next scrum with a design for the bee and the dragon.
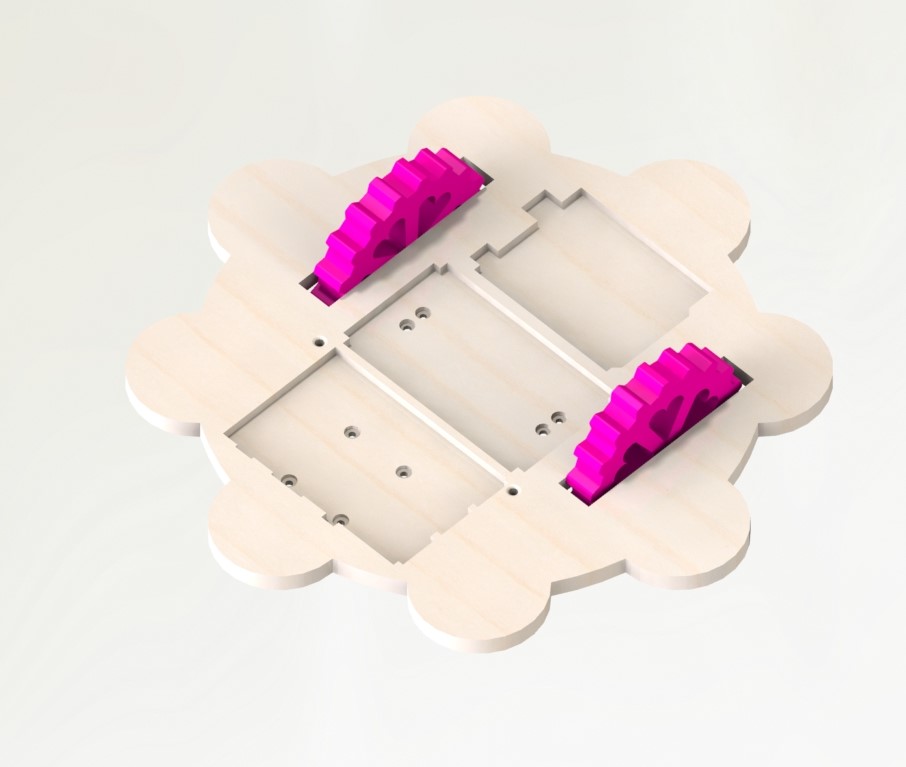
We then started laying out pros and cons of materials we wanted to use to build the robots. We knew the “shell” of the robots would likely need to be 3D printed, as we wanted to do complex geometric shapes. We then were trying to decide between laser cutting the base out of hardboard or 3D printing it. We finally decided that 3D printing would be better, because we would need multiple layers of hardboard to get the design we wanted, which would start getting fairly heavy and thick.
We then finalized the design for the two robots, and got to work CADing them. Although we had planned to have some amount of the robots done by the end of this sprint, we underestimated how much work we would have to do on the software side of things, so we were unable to manufacture anything. We set a goal of having our MVP manufactured by the end of sprint 3, which meant two robots!
We hit the ground running in sprint 3. We almost immediately began prints for the robots, knowing they would take a long time. It was good we did this, as we hit a lot of obstacles pretty early on. One huge one was that we forgot to tolerance everything properly. We also ran into issues with the 3D printers such as prints failing, taking too long, running out of filament, or warping our parts. This made us add a new pre-check before printing parts, so someone would look over a 3D print before it was printed to ensure filament and printers weren’t being wasted.
Because of all the print failures we ran into, we did not have time to print the broken base of our bee, so we pivoted to more quickly making it out of hardboard instead. Our exact concerns about using hardboard originally came up immediately, as the base was heavy and thick. It worked for our MVP, but we did not want this to be in our final product. We also ran into a fair amount of issues with the dragon, such as the base missing holes to mount wheels and motors. Because of this, we were only able to have the bee completed by the end of this sprint.
We started sprint 4 by fixing the missing pieces of the dragon CAD and reprinting the base for the bee. We also needed to pick the motors we wanted to use. Our robots were heavier than we had initially planned, so we needed a fair amount of torque to get them moving. We scavenged through the PoE supplies and found some motor systems with built-in gearboxes we decided to use. We also thought using different motors for the bee and dragon could be really fun, so we decided to give the bee a less geared-down drive train than the dragon.
Because we were using new motors, we needed to design new motor mounts. These were CADed late at night, and ended up having more than a few dimensioning errors once they were printed. We learned a valuable lesson that CAD should be done by someone in a clear state of mind, and not at 2 AM on three hours of sleep. We decided we should use the motor mounts anyway, so we broke off pieces we didn't want with flush cutters and made what we had work.
Once everything was done we decided to make our robots more aesthetically pleasing by spray painting them. We began with a white base coat since both were printed in black filament, then planned on going over everything with colors we thought would look good. Unfortunately, we ran into problems while spray painting the color on the dragon, and the base coat began peeling up. We decided that since there were a few other issue such as the size of the sensor holes in the shell being too small and the original spikes not being super family-friendly, so we decided to make a few modifications and reprint it (in white so we wouldn’t need a base coat).
Once everything was printed, we carefully re-spray painted it and put it all together. We had almost all mechanical work done around a week before the final, so we had time to debug and test other systems.
This is a CAD of our robot from the first sprint. Although it was simple, it got the job done in being an effective and low-cost test bed for our code and sensors.

These are some of the designs that we came in with when asked to make bee and dragon designs.
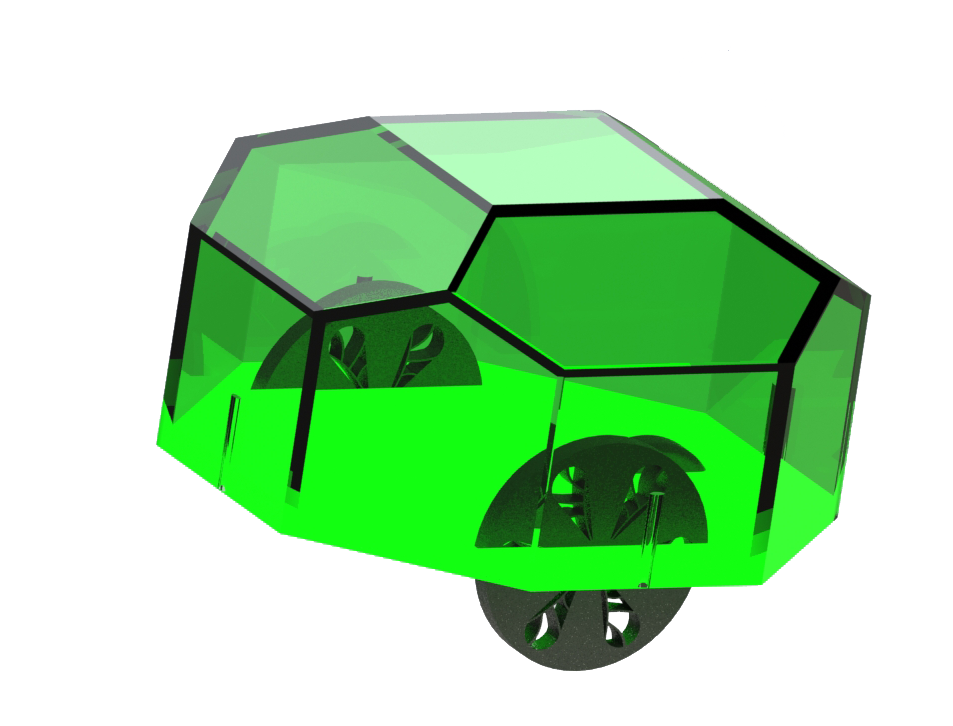
Our original bee CAD looked a bit like a turtle, so we nicknamed it turtle-bot.
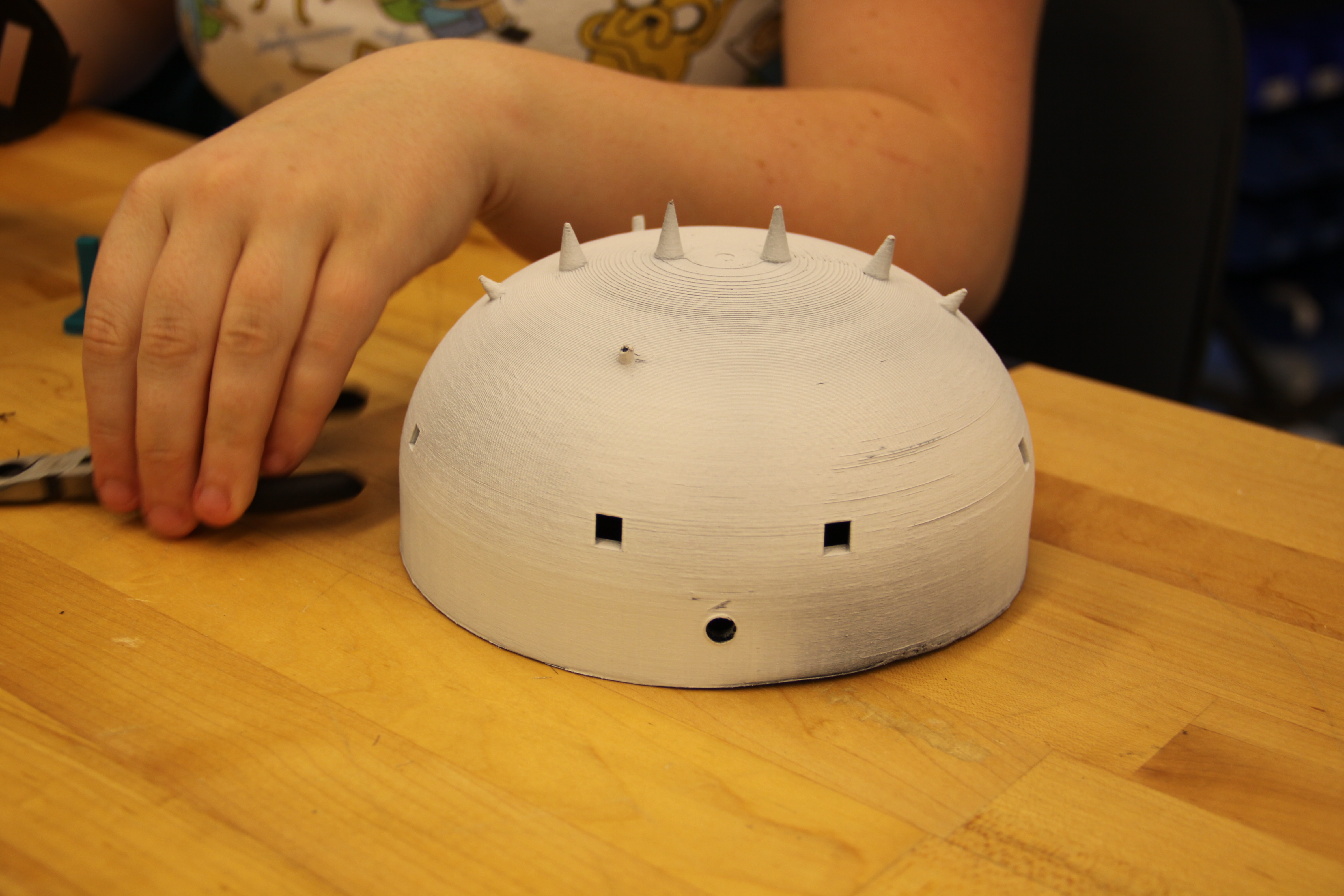
Our original dragon design, complete with spikes! After stabbing ourselves a few times, we tried to cover the spikes in materials such as playdough.
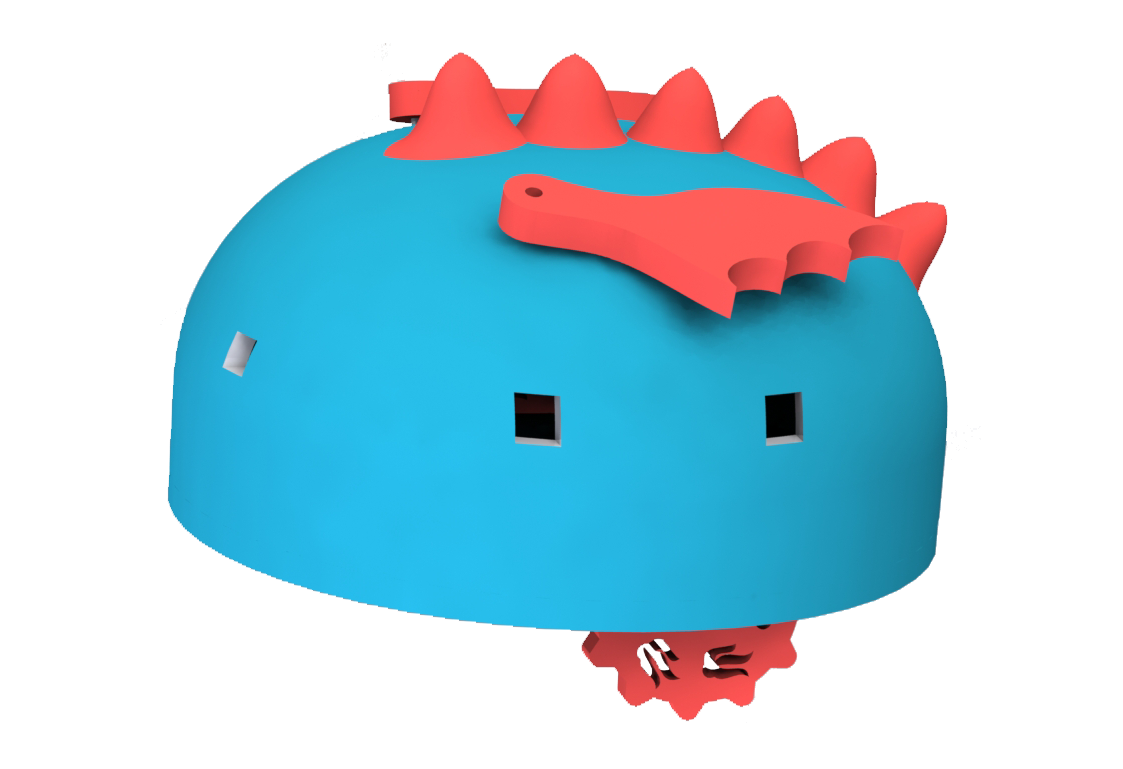
Our final dragon design had rounder spikes, fingers everywhere rejoiced.
We had a lot of fun spray painting our robots, but we had to run deeper into the building occasionally to escape the cold.
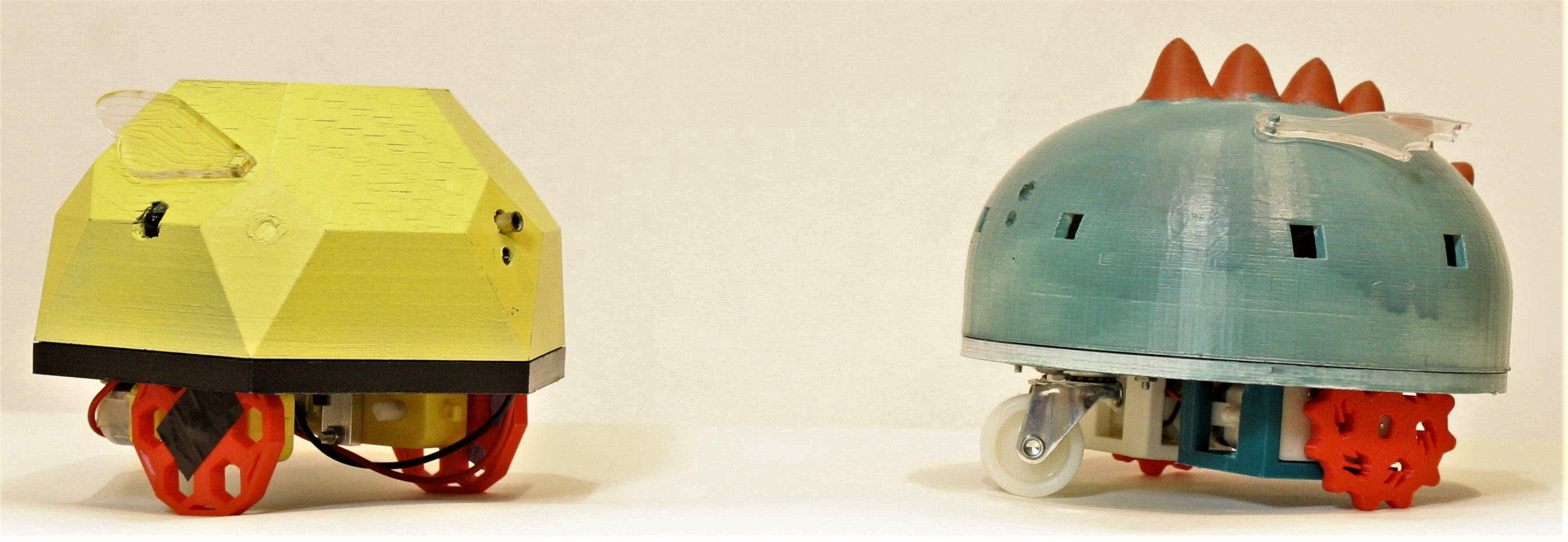
Our completed bots. Spraypainted, assembled, and driving around.