Goal
Our sprint three goal was to achieve full MVP functionality by actuating the z axis and adding necessary zeroing and user interface features so that the system can etch a simple PCB design.
Demonstration
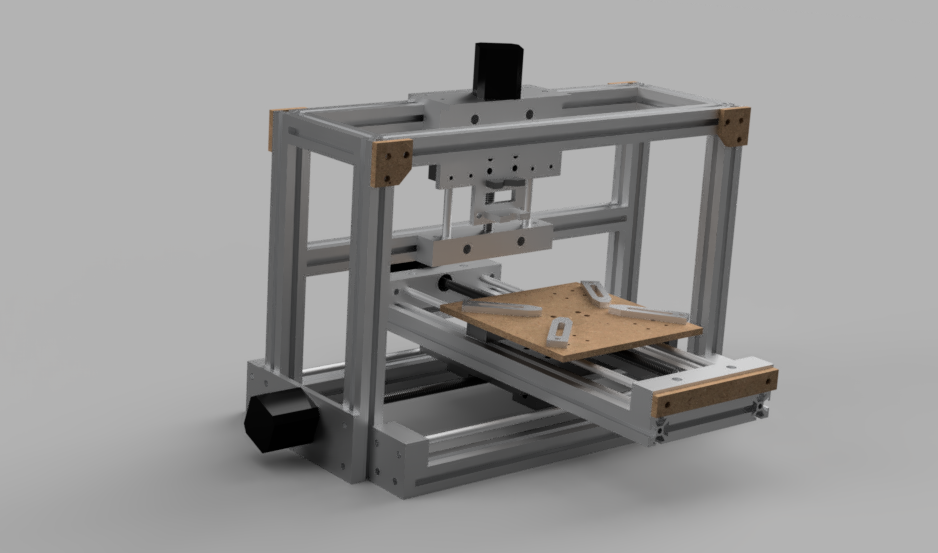
Mechanical
The most significant mechanical change during the third sprint was the addition of the third lead screw for z-axis actuation. Also, all motor/ways hardware was replaced with milled or waterjet aluminum plates for increased rigidity. Additionally, the x-axis ways were moved further apart to increase stability. We also drilled through holes to replace all captive bolts for precision and ease of assembly and started milling blocks to hold the linear motion rods and lead screws for each axis, replacing the laser cut parts from previous sprints.
Electrical
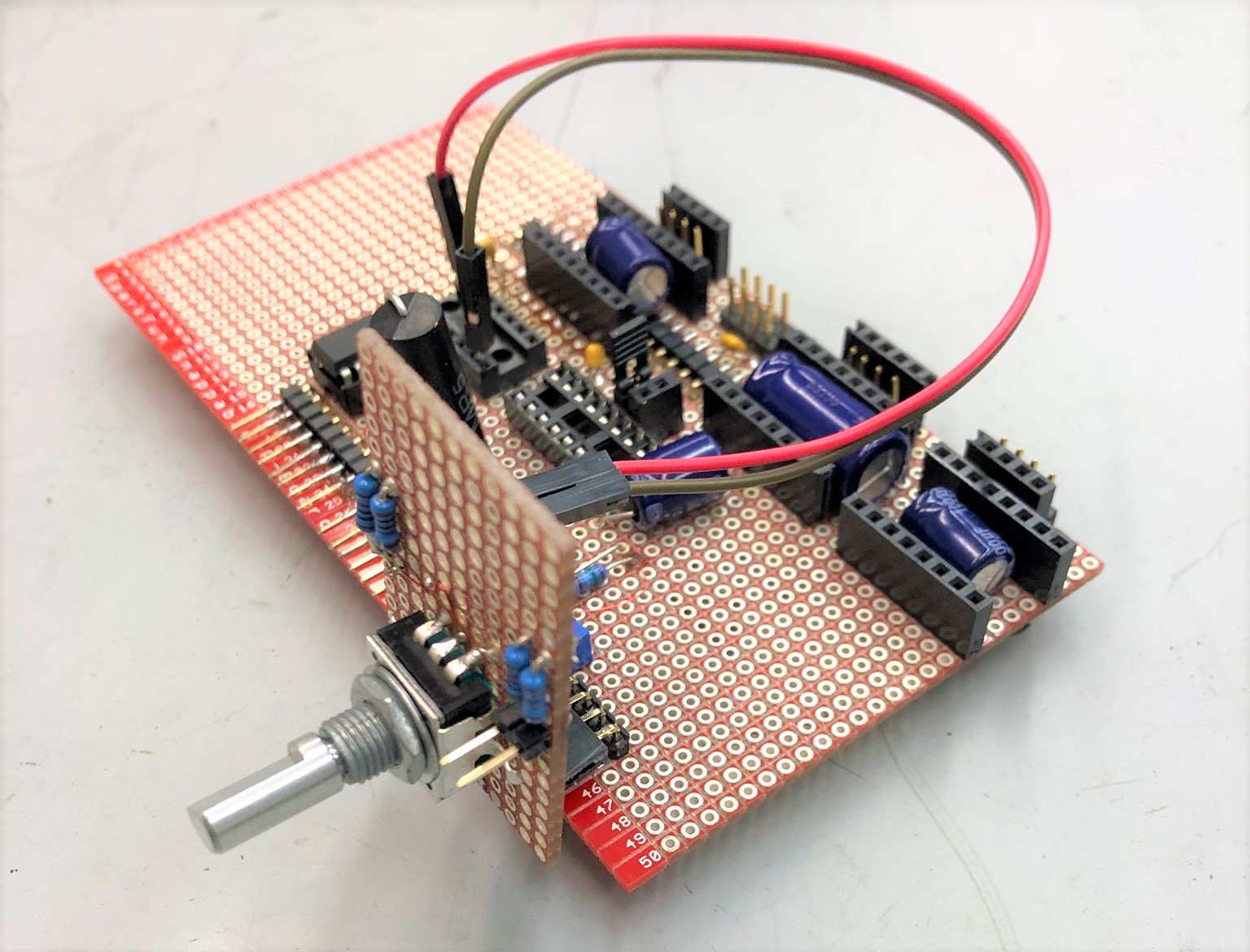
The major electronic addition this sprint was support for the pen-up an pen-down motion of the z-axis spindle assembly and a simplified circuit with a MOSFET and a current-limiting resistor to power the DC motor for spindle. Also, we installed a quadrature encoder for manual, safe z-axis adjustment and a free single pole single throw switch for emergency power cutoff. We also used this sprint to fabricate our extension board for controls.
Software
In the third sprint, we built out the framework for the software pipeline to abstract away all of the details for the average user without sacrificing the error checking and troubleshooting of a skilled user. To complete this task, we configured a touchscreen for the raspberry pi and created a graphical user interface that interacts with the complete software pipeline for straightforward use. We also wrote the firmware for the quadrature encoder.