Process
Recap from Sprint I
November 10th
Our accomplishments for Sprint I were to create the upper half of Manny that would respond to given dummy movement data that substitutes motion tracking data from a Kinect .
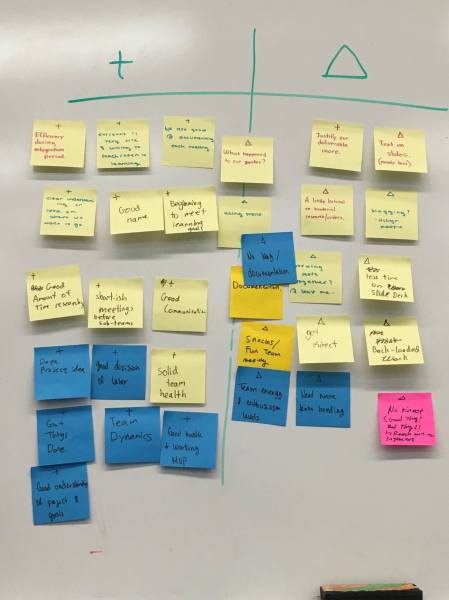
We decided to start off our first meeting by recalling our positives and changes that we want to make after Sprint One.
Our future goals involve blogging and documenting, ordering the Kinect and more team bonding. Some positive factors that came up are that we have a good team dynamic, efficient meetings, an awesome project idea and a clear understanding of project goals.
Kinect? Or nah
October 30th
For today’s meeting we were able to borrow a kinect so the software team focused on becoming familiar with integrating the rasperry pi and kinect while the mechanical team investigated the types of materials for the Sprint II Manny.
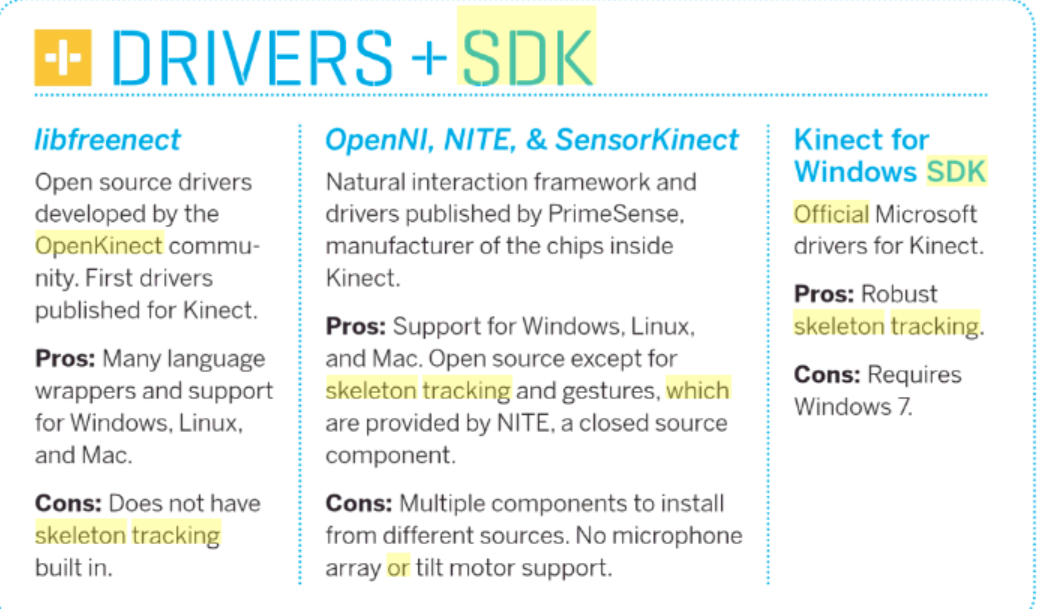
The software team’s goal was to connect the rasberry pi to the kinect so that it would be able to skeleton track. We realized that the the skeleton tracking platform used to integrate skeleton tracking through the rasperry pi and kinect were either outdated or impossible. OpenNi, NITE & SensorKinect was bought by Apple and the data/relevant research is no longer accessible. The second option is Windows SDK which is not supported by rasperry pi. Libreekinect is the most commonly used, but it does not support skeleton tracking.
Upper Body
- Grip Spring - McMaster Carr (ASK)
- Spring Pin - POE room
- Links - Sheet Metal (ASK)
- Fishing Line - DesNat Studios
- Disks - 3D Print
- Disks - 3D Print
Lower Body
- Disney Sparky Robot http://robotics.usc.edu/~raul/pictures.htm
- Also shoutout to Antonio for the the chocolate and walnuts!!
Happy Halloween
October 31st
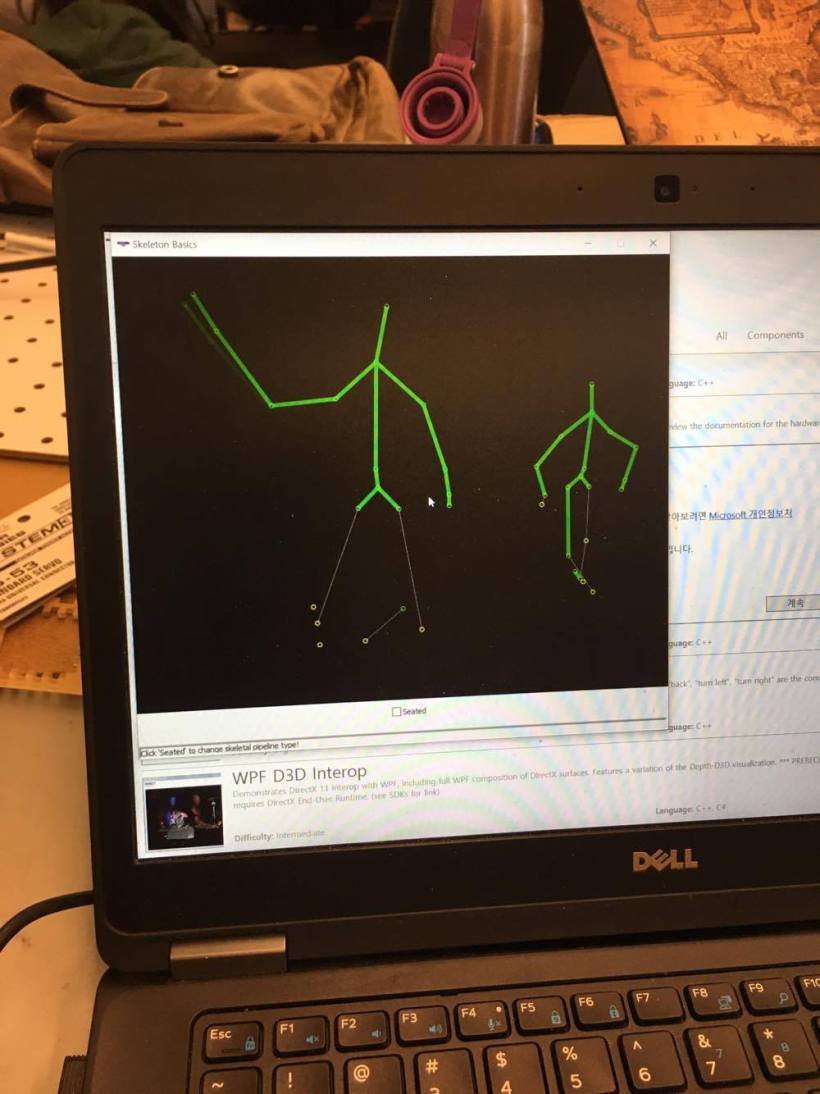
The software team decided to use OpenNi2 + NITE2(middleware) for skeleton tracking. We found two different types of links that we can use to implement. One thing to keep in mind is that apple did aquire openni a few years ago, so the data is a little old but we do have three different options to choose from in case one does not work. Below are two links to show how to download OpenNi2 + NITE2, three different implementation codes for OpenNi2 + NITE2 and a youtube video showing the program running.
Instructions for Downloading OpenNi, all the necessary libraries and how to use them on Raspberry Pi:
- http://www.etti.tuiasi.ro/cin/Courses/SistEmbedded/Projects/Linux/BeagleBoard/Kinect_on_Ubuntu/Kinect_on_Ubuntu.html
- https://www.icyphy.org/accessors/wiki/ROS/InstallingThePrimeSenseKinectSensorOnUbuntu?from=Main.InstallingThePrimeSenseKinectSensorOnUbuntu
- NITE 2.2 Download link: https://bitbucket.org/kaorun55/openni-2.2/src/2f54272802bf/NITE%202.2%20%CE%B1/?at=master
- OpenNI Gitub Link: https://github.com/severin-lemaignan/openni-python
- OpenNi + Nite2 Python Binding: https://pypi.python.org/pypi/primesense/2.2.0.30-3#downloads
- Youtube Video: https://www.youtube.com/watch?v=tcnhcoYUDPQ
Software teams goal today is to connect the raspberry pi and kinect to see how well the software will run.The Mechanical team is updating their solidworks to the most updated version because they are currently unable to share parts. They also divided the work within the team between the top half and bottom half. They also had a conversation with the professors to talk about the logistics of the initialization of the joints going forward. Also shoutout to Chloe for looking stellar in her Poseidon costume!!
New Month, New Goals
November 3rd
After receiving our Sprint One reviews we decided to make changes accordingly. For our first Sprint we only used a Raspberry Pi while we have to incorporate a microcontroller into our project. For the software team, our goals for today were to connect the 8 servos (voltage and code) to the Arduino and to get the skeleton tracking on our kinect.
Success!! For the mechanical team, they have figured out the basic ideas for the arm motion and have 3D printed out some parts. Today’s goal is to figure out more of the base and legs and what slots they need for the legs to move. Overall, a great day for Manny the Man.
Making Progress...
November 6th
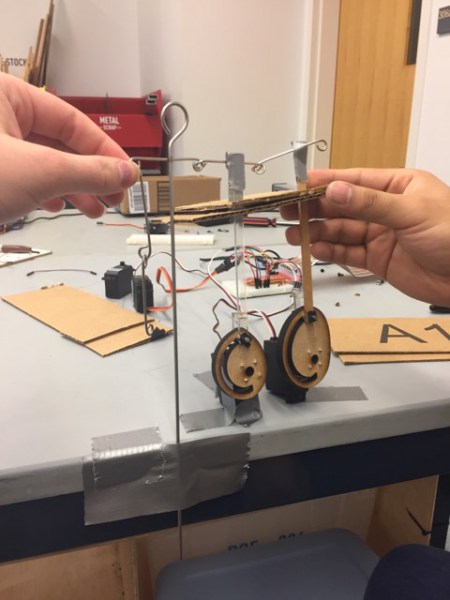
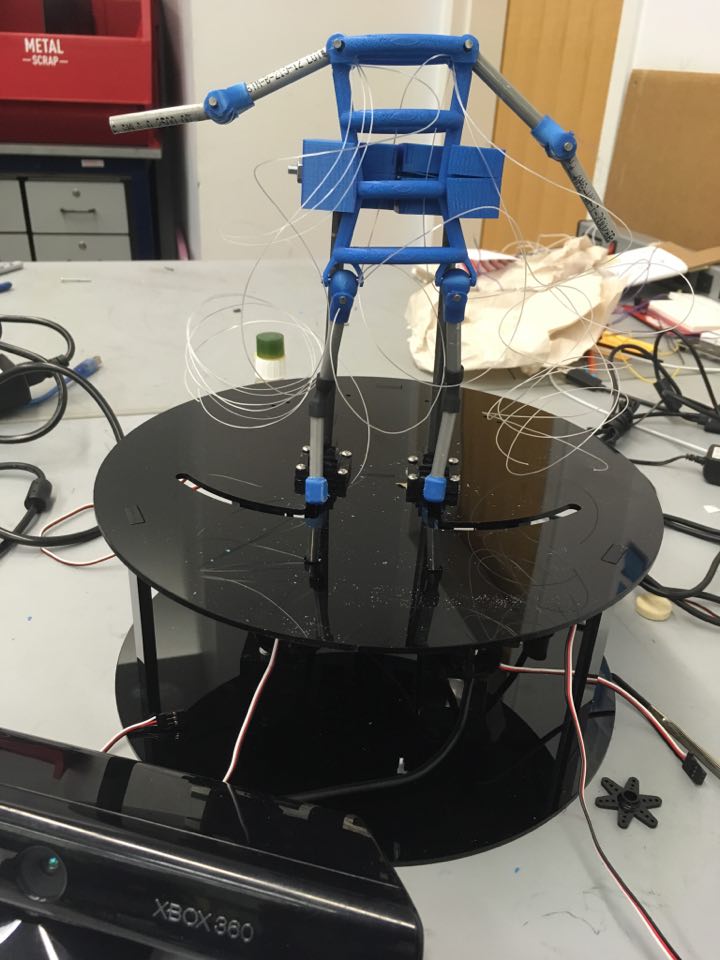
The mechanical team has been working on their respective halves of their body, during this meeting they are discussing the combination of the upper and lower body. Antonio has made the first prototype using the 3D printer and fishing wire. They are also waiting for things to print/ laser cut which will be accomplished by next task. Overall, great job mechanical team!

Antonio with the first prototype of the arm!
The software team has been working on running the 8 servo motors and finding a way to run kinect on the Raspberry Pi. There was a setback with the power cord because it needs to have (10 Amps) but it only has (2 Amps) so it was only able to run 4 motors. The other power cord will arrive before the next meeting which will allow the software team to start troubleshooting. Shout out to Allison for bringing the delicious trail mix/ candy corn!!
Recap from Sprint II
November 13th
We had a team bonding event on Sunday that consisted of our performance in Sprint II and also a photoshoot. Even though we did not fulfill the MVP, we were able to keep our cool and are making changes for Sprint III. Pictured below is our team in front of the Babson Globe!

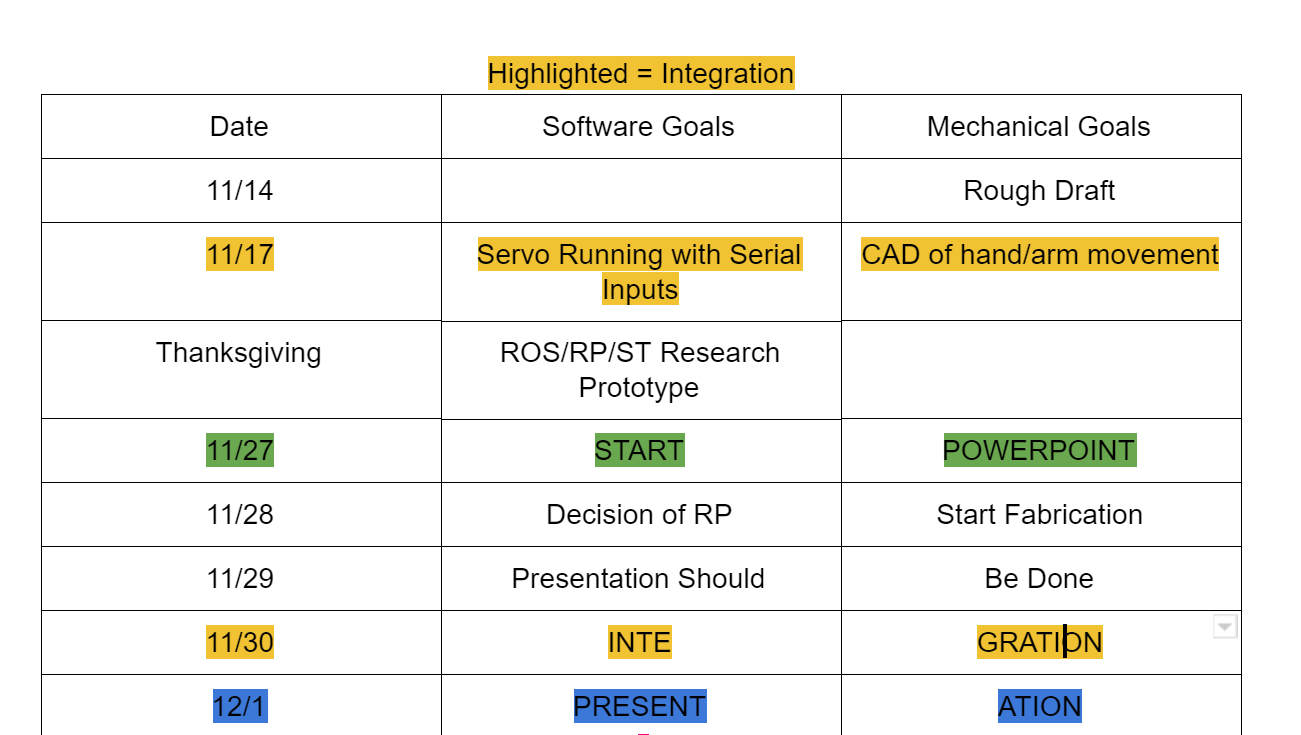
For this meeting we created a timeline that emphasizes on integration so that we will not be backloading our work once again.
For today’s meeting the software team will continue to work on the integration of kinect on the raspberry pi while the mechanical team will be completing the front half/bottom half of the structure. We will also be indulging in JP licks ice cream after the meeting today.
Gettin Ready
November 7th
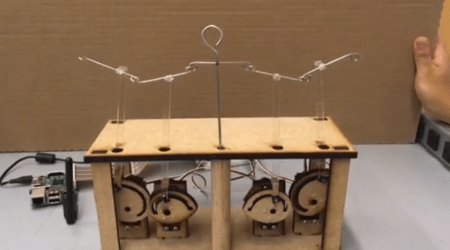
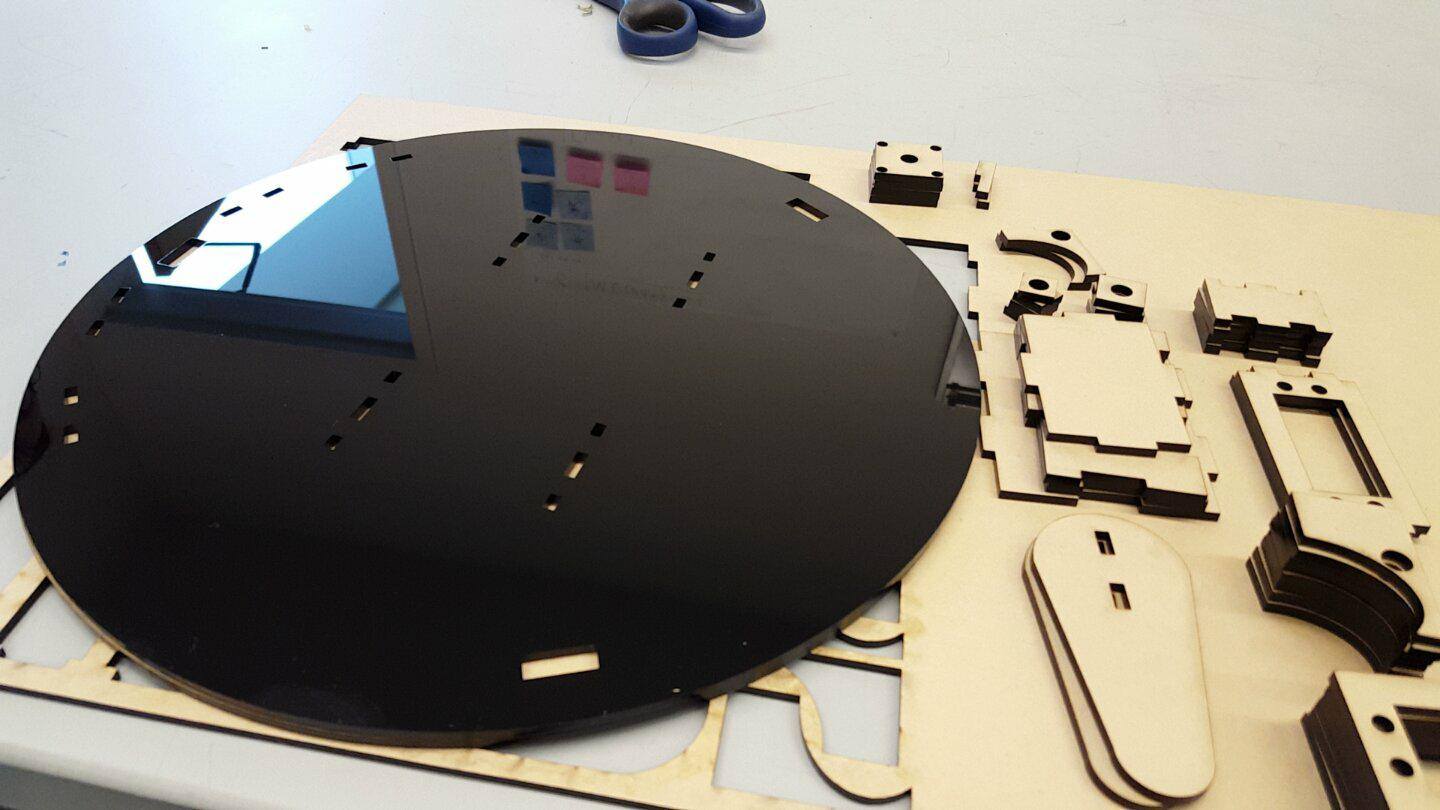
Getting ready for the Sprint. Our goals for today are a continuation of yesterday’s goals. The software team is making progress on the servos and will meet again on Wednesday to complete it. The mechanical team has made the smaller version, in preparation of the Sprint. Here are some photos of the parts:

Stickin to the timeline
November 14th
For today’s goals, we were focused on sticking to the timeline. Mechanical’s goal was to finish Manny while the Software team’s goal was to finish the integration. For the mechanical team Antonio finished assembling the top half of Manny! Chloe is having issues with 3D printing the bottom half, but festina lente. For software, Seugin finished the interface portion for the kinect. Grace and Allison were working on how to transfer the data from the kinect to the arduino.
Meeting before Thanksgiving Break!!
November 17th
With today being the final push before Thanksgiving break our team is hard at work. Chloe is working on the complete redesign of Manny. Antonio is working on fixing the base and adding an external piece so that the support does not get in the way of the leg joints. The software is researching the different way to use the kinect on another type of board because the raspberry pi will not be able to support the kinect skeleton tracking software. I (Grace) will be working on trying to convert wordpress into a static website without upgrading to a higher service. We all have a lot to be thankful for and are excited to go on thanksgiving break!
Going up with UP Board
November 28th
We have a busy week ahead of us with our third sprint on Friday. We did our meeting checkups and everyone is eager to work and progress with the stuff we need to do on our timeline. The mechanical team is working on the final production of Manny while our software team is working on installing Arduio on the Upboard. We are still debating on whether we will be using the new mechanical structure for this Sprint. The Upboard is a very great alternative with almost no lag, it is a good day.

Seugin and Allison in awe with the Upboard.
Big Day Before Sprint III
November 30th
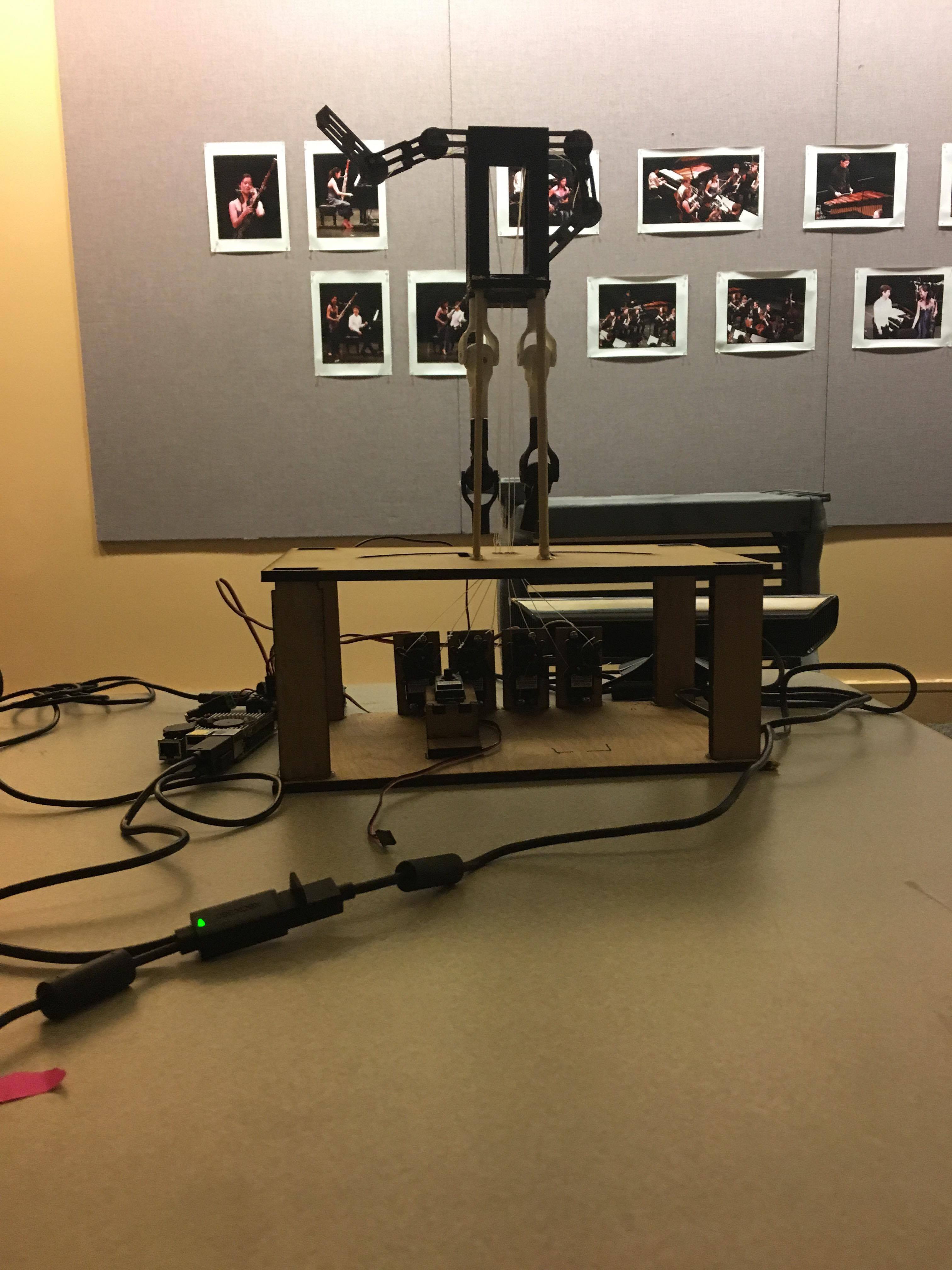
We have integrated the servos and the final production of Manny but unfortunately Manny seems to be uncalibrated. This was strange to us because the servos seemed to be working great before break. We made the mistake of assuming that things will work on a larger scale. The servos worked on one side but when we attached the other side, the calibration did not transfer. Next time we will need to integrate more frequently.
Final Stretch
December 4th
We have a week before the final product, we have created a timeline but the issue is that a lot of dependent pieces are in the process of being created. Today we will be choosing another theme for the blog. We will also start working on the website and dividing the different pages. We have reflected and realized that we are truly learning the struggles of integration.
Kaizen:Positives [+]
- Good place to have stopped working
- We have a good balance
- Got the kinect working on the Upboard
- Made a good level of team health
- We got full sensor for a full system
- Everyone worked hard
Negatives [-]
Kaizen: Small integration and communication
Shipping Pains
December 7th
Today was extremely exciting, we got a lot of our shipments including the Upboard, Acrylic and Aluminum for our final Manny. We also started working on the website and divided the work based off what everyone was most comfortable with. Our hero images ar is due tomorrow
Kaizen:Positives [+]
- Good place to have stopped working
- We have a good balance
- Got the kinect working on the Upboard
- Made a good level of team health
- We got full sensor for a full system
- Everyone worked hard
Negatives [-]
Kaizen: Small integration and communication
Shippin'
December 5th
We have just received a shipment of most of our final Manny. This includes the acrylic which will be used for the base, the rod that will allow for the standing of Manny and also our wires. We paid 60 dollars for the total purchase order but over 50% of that cost was attributed to shipping. Even though our items were not space consuming, they came in a very large box so we had to pay for for the extra shipping. We have learnt our lesson and this seems to be a very common mistake within the different POE teams.
;
Updated Code
December 6th
Today Seugin did an amazing job transferring information and creating the website. We had to create a new static website because we only had the wordpress at first. We were thinking of converting the online wordpress into html but than we noticed we would have to pay for a plugin. We just decided to go with the old fashioned route and create a static website. One of the biggest issues is getting our pieces printed because we want high quality prints, but the printer is not performing. Hopefully it will work soon. Allison did an amazing job fixing the code so we really hope this works.

Stuff is cut
December 10th
After days of trying to get access to a working printer, we were finally able to print out the final pieces of Manny (Thank you Chloe). This is extremely exciting because we have been trying to print these pieces for a very long time. We are still on top of schedule, which leaves us two days for integration.
Partially Configured
December 11th
Manny is partially configured but we still have to integrate it. We are finished with the mechanical and the software side of Manny but the integration is usually the most difficult portion because anything could trip it up. This entire project has been focused on integrating smoothly and that is one of the biggest lessons we have learned. Kaizen.
Last meeting
December 13th
Almost finished
December 11th
We are working on the full assembly and integration of Manny today so that tomorrow we can hopefully be ready to go. We have Manny together but one issue we encountered today was that one of the joints are not turning. Chloe suggested that we loosen up the tension of the joints by filing away some of the material. For the longest time, the other half does work so it is a little confusing as to why the other side does not work. Allison and Chloe ended up staying up around 2 am to make it work. Great job guys!
This is officially our last group meeting 😞. We are finishing the last portions of our website and making sure that we finish up anything that needs to be done. Shout out to Allison for creating an awesome outline of Manny. This outline does a great job emphasizing the relationship between the Servos, Kinect, Upboard and Manny. We all worked extremely hard to make this possible and I am extremely proud of this team. Looking back, we have hit a few bumps along the way, we can all agree that this has been a great learning experience. We learned about the struggles of integration, mental health and communication. We definitely felt a good amount of challenge and worked hard through those times. I sure am going to miss this team. Thank you guys for being so amazing! - Grace Huang