Interactive art is on the rise in our current society, from visual media arts produced at the MIT Media lab to informational aesthetic displays popping up in public places. Our team took inspiration of this new movement, and developed an interactive art sculpture, meant to be visually appealing while engaging a larger audience.
We also took inspiration from the movement of birds, impressed by how they move in a flock, despite there being no distinct leader. Our sculpture thus abstractly represents how birds would move based on the motion and audio around them.
Complex Kinect is a 1 x 3 x 8 foot sculpture, that is able to stand completely on its own. It has eighteen origami structures, that are grouped by three, on a grey background. The user interfaces with the sculpture through a web application, allowing the user to engage with the sculpture in three different ways: through audio, through motion, and through a preset demonstration. If the audience chooses visual, then the nodes will open and close depending on the motion in the camera. Thus as the user walks by the structure, the nodes follow his or her movement, simulating a flock of birds slowly taking off.
If the user chooses audio, then the nodes will move depending on the sound in the environment. If there is a lot of noise, then the nodes will move rapidly and at the same time. If there is only a little bit of movement, then only a couple of nodes will move at that time. The last option that the user can choose is the demonstration mode, which allows the user to experience the movement of the sculpture in a pre-set demo, which shows the highlights of the sculpture, without playing on its interactive side.
Mechanical Design
To minimize moving parts and the introduction of friction, our system uses a rack and pinion drive system and a servo motor to move a line of 3 flowers. The servo racks back and forth to move the pinions in and out of the front which moves the inner section of the flowers.
Software
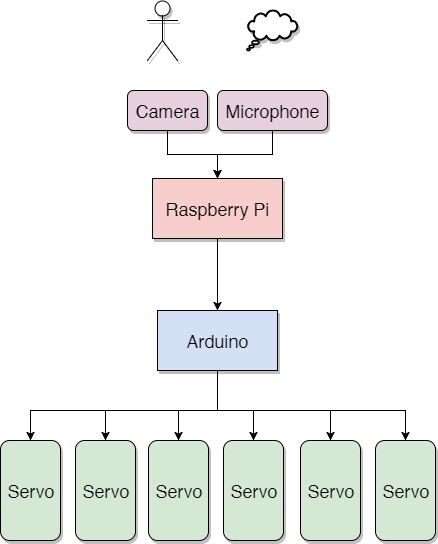
Using OpenCV and a Raspberry Pi camera, our system tracks motion within the frame. Dividing the frame into quadrants corresponding to the physical apparatus of flowers, the system transmits which frame(s) have motion to the master arduino.
Electrical
In order to supply enough current to our servos, we have the microcontrollers on a separate power supply from the servos. Our electrical system is very simple with each servo requiring just power and a sense line.
Financial
In order to accurately track our expenses with transparency, we’ve included a break down of all the components used for this project. We outline where we got some of our sources and you can see how much the whole thing cost to make.