During our first sprint we created a small structure with hanging objects that are moved up and down based the frequency of sound observed in the previous few seconds. We also decided during this sprint that we wanted to pivot to building a structure with nodes that open and close based on movement instead of sound.
Sound Processing
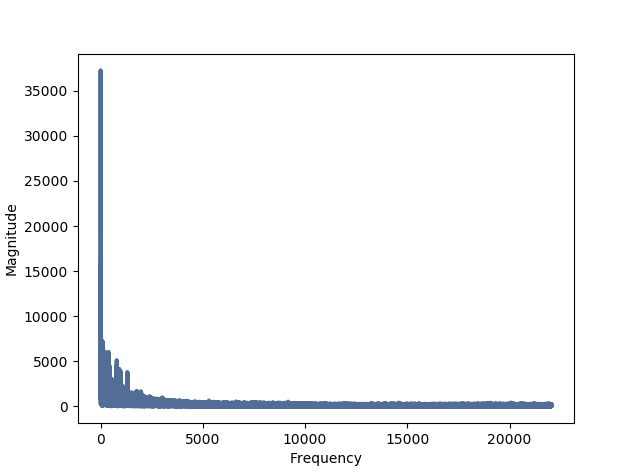
For this sprint, the software team worked on recording audio using a computer microphone and processing the sound waves. We learned about using threading so that we were able to record and process the sound waves simultaneously. We determined which frequency was most abundant in the previous few seconds and sent a value to serial corresponding to which frequency the microphone had just heard.
Integrated System
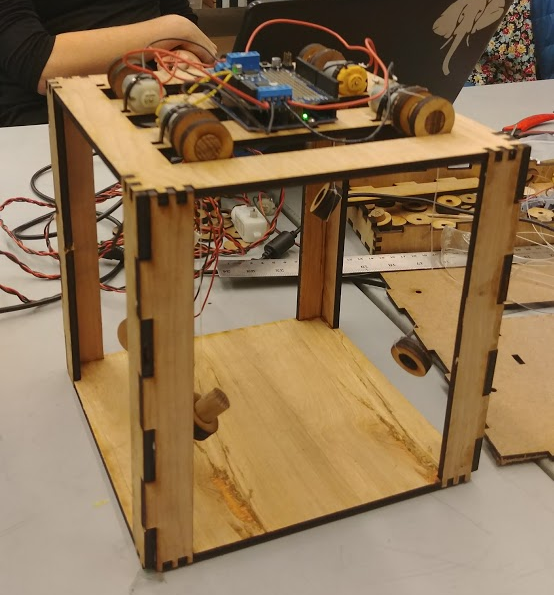
The integrated system for this sprint consisted of a laser cut box structure with 4 hanging shapes attached to motors. The 4 shapes would move up and down according to the frequency of sound in the enviroment. We collected sound sensor data with the laptop microphone and connected it to our structure so a specific motor would move depending on the range of the maximum frequency from the previous few seconds.
Mechanical Progress
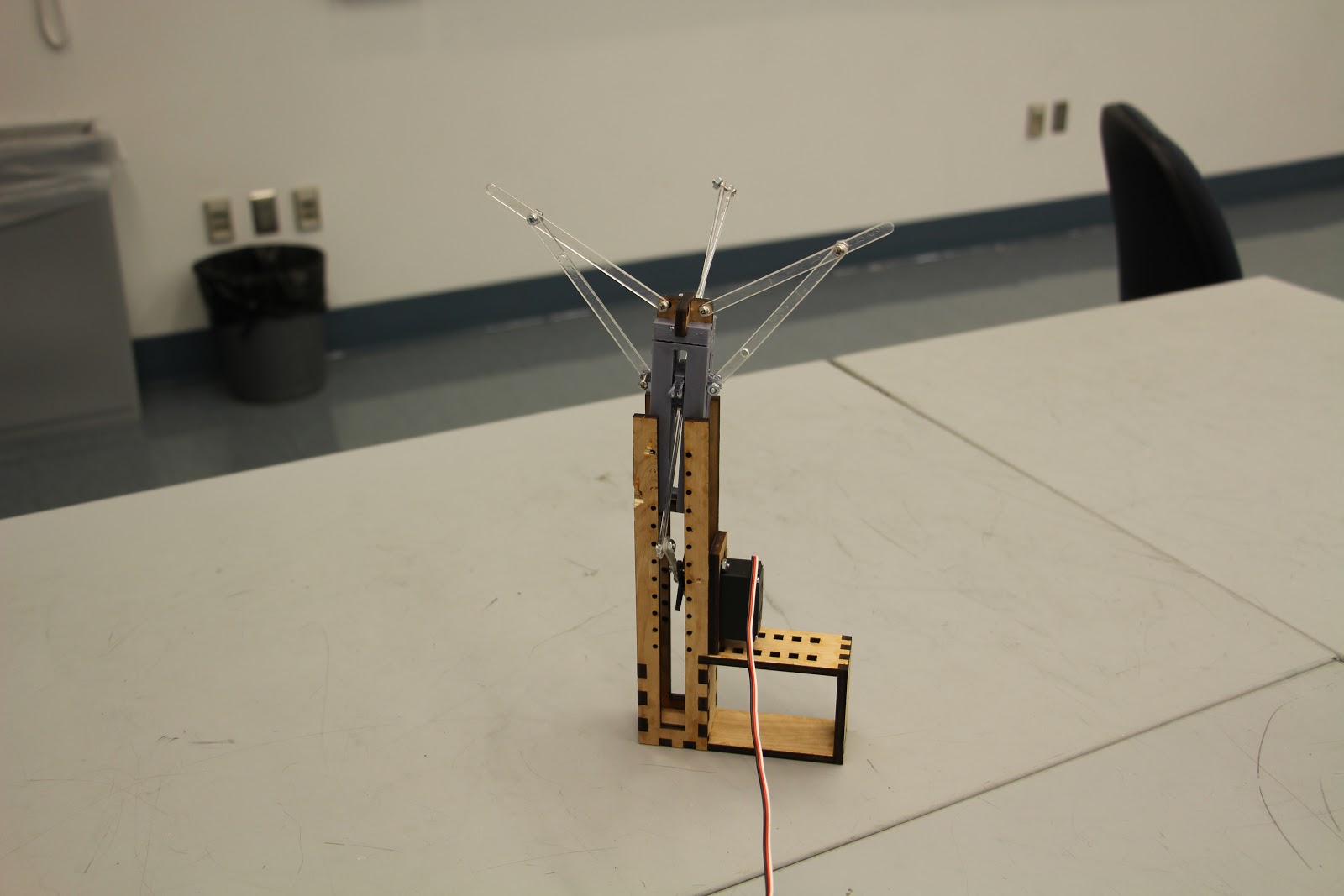
During this sprint our team decided to pivot to a mechanical design with a structure that would open and close instead of shapes that would move up and down. Due to this pivot, we spent some time working on a structure that opened and closed in addition to making progress on our integrated system. We were able to design and build such a structure that worked but was overdesigned and large.
Sprint 2 Goals
Our goals for sprint 2 were to have a grid of nodes that expand and contract using servos in reaction to a person walking through which we planned to detect using computer vision. We also had the goal of expanding in later sprints to incorporate bird movement using a cellular automata model.
