Specifications
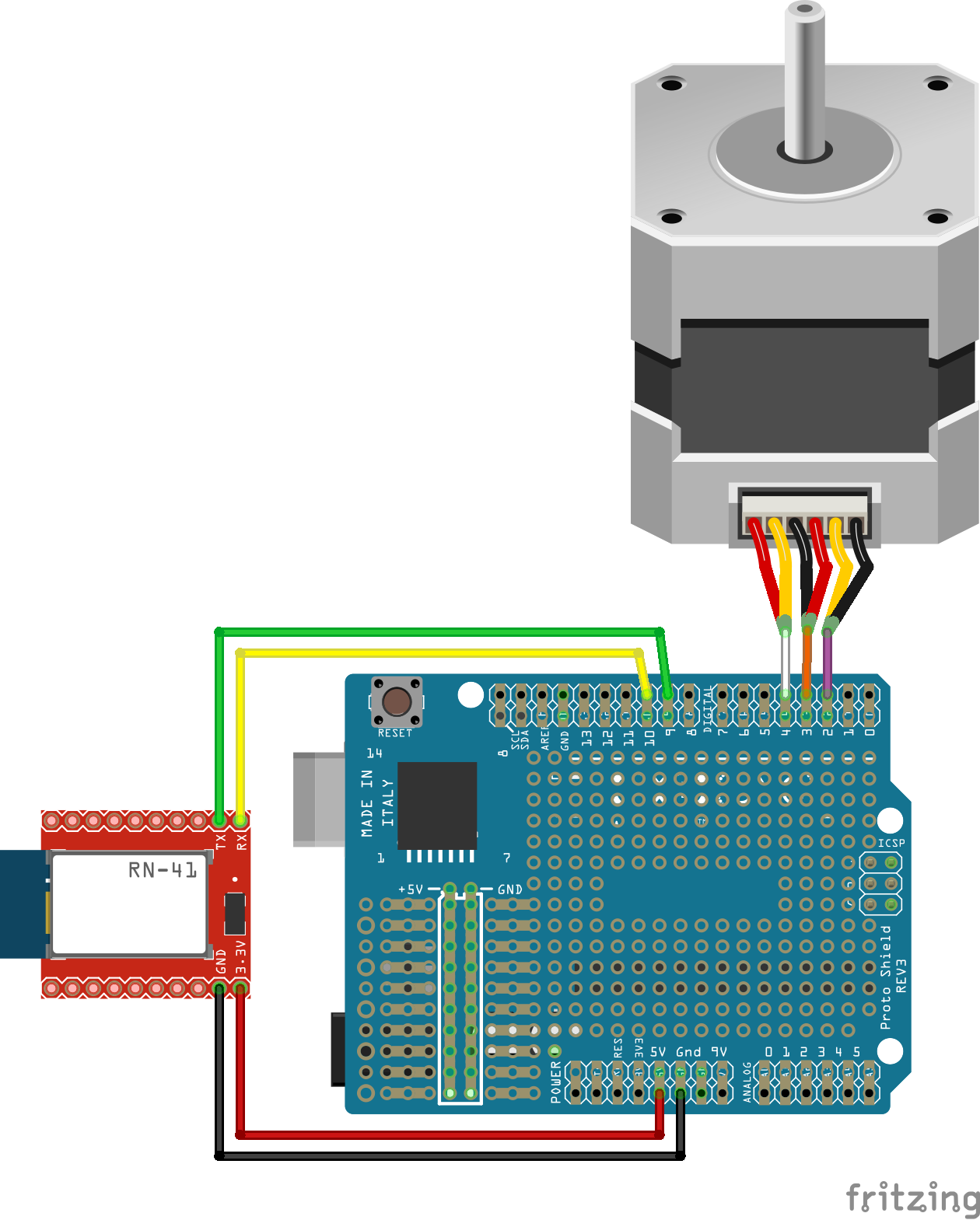
The electrical system of Falcon is composed of 2 main components - motor control and wireless communications. See the fritzing schematic at the bottom of the page
Motor Control
Using the clearpath motors in Pulse Burst Positioning mode, the ClearPath motors move a distance proportional to the number of pulses sent to the motor’s input. To move the motors a known distance, a variable number of pulses is sent to the motor, where each pulse moves the shaft 1/800th of a revolution. The ClearPath internally calculates trajectories and acceleration profiles, and commands can be chained together to create smooth, longer movements.
We calibrated the ClearPath motors using the built-in software and tested different velocities and accelerations until we found a smooth one we were happy with. We initially used a high acceleration, but quickly learned that made the motion jerky because we are controlling with Pulse Burst, meaning many quickly commands are being sent in succession. When transitioning to a smaller acceleration, the motion was much smoother, which is important for attaining quality footage.
Wireless Communications
In the final setup, the motors will be mounted an unknown distance apart, making the design of a wired system difficult and non-optimal. Thus, Falcon uses bluetooth to control each of the node’s motors wirelessly. We used the RN41 Class 1 Bluetooth Modules to control each Arduino. These modules are high-power enough to maintain consistent and reliable communication at distances up to 100 meters. Each Arduino is addressed and controlled remotely using a serial connection over the Bluetooth protocol at a configured baud rate of 9600-115200.