The Final Stretch
11/30/18
We met at five in the West Hall fourth floor lounge, to discuss the last sprint. We kept up our traditional plus-deltas, and discussed taking a new direction. After reviewing our feedback, we discussed the things we liked and the things we would change as we moved on to the final sprint. We all really liked our sprint two kaizen, and decided to keep doing integration tests every meeting. We also decided on our new kaizen:
“Set clear goals and clear plans to achieving them.”
To make this kaizen more actionable, we decided to clarify our design goals, since we hit our MVP and didn’t have a clear idea as to how we’d take it further. We felt so close to having a device that can input MIDI files, it didn’t make sense to give up on that goal now. We also want to beef up our mechanical system. We decided to add another finger to our robot, one that can move independently of the first. Both fingers will move on the same gantry, so they will not be allowed to cross. With these decisions made, we reset our trello, and began the final stretch.
-Katie
12/4/18
The direction we settled on last meeting was to pursue MIDI integration with NINJA help, and to simultaneously work on adding another finger box to our gantry. We ordered the materials we needed to move on, and discussed final aesthetic ideas. Stan made a song request: Jingle Bells.
Towards the end of the meeting, Daniella came to help us pick a way to assemble our physical system. I’m looking forward to our meeting tomorrow.
-The Team

12/5/18
We met for our regular Wednesday meeting, and continued to work on implementing the python MIDI blackbox we received from Nick Steelman. Online, we found a few code examples that use Python to communicate with the serial window, and are feeling more confident about the implementation. We also reviewed the website requirements and are continuing to implement them. We discussed stylistic elements, and spent a lot of time trying to adjust our code for the MIDI, while Kyle laser cut some parts to implement our second gantry. We also discussed our potential interfacing device.
-The Team
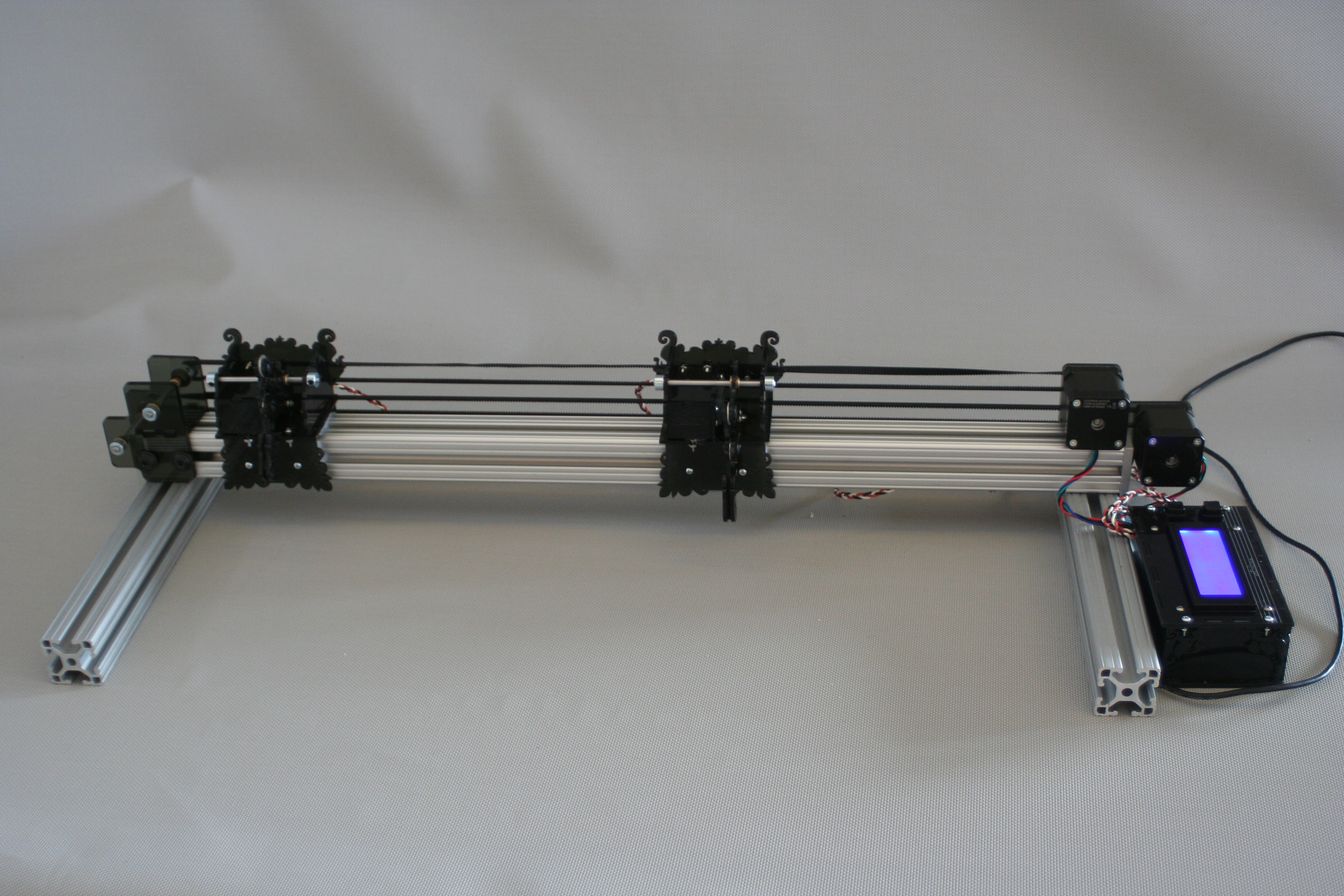
I spent most of this meeting working on editing blog posts and updating the website, but I also started working with the cut files Kyle had created, in order to make them a bit more aesthetically pleasing. One of the goals that our team set at the beginning was to have our project look good, and, given that we had made our MVP, we agreed to put some time into polishing it. After a brief discussion with the group about what style we wanted to go with, we settled on a Rococo-era-inspired design, drawing reference to the embellishments that are on many antique pianos to this day. I have now taken the CAD files into Adobe Illustrator, and have begun the slow process of drawing.
-Mika
12/7/18
We are still working on debugging the implementation of our blackbox. To fix our two most major issues, we are going to implement a Python script that turns the verbose MIDI outputs into numerical ones, and a Python dictionary to convert the travel notes to travel distance. Our new box designs are still in progress, we are still adjusting our website, and we are preparing the implement the second gantry system. There’s a lot to do, but worst comes to worst, we are still at MVP, and everything we complete will be an improvement. We are still waiting for our second stepper motor, and we are hoping to make it to Kyle (the NINJA)’s hours on Sunday to work out the interaction between the Python script and the IDE program.
-The Team
12/11/18
Dawn of the final day...approximately! Today, I spent a majority of my time in the laser-cutter studio, getting our cut files ready for assembly. It took several hours to get the pieces cut adequately, especially since our first run didn’t cut all the way through the acrylic. The results are worth it, though, and, when we fit the pieces together, the results look awesome. We used our acrylic as economically as possible to get the most out of it, which gave us some extra material to use for ornamentation. All in all, I’m proud to say that our piece has both mechanical form and function!
-Mika
12/12/18
Today, we gave our last attempt at MIDI implementation. We put our all into it, but unfortunately were still running into some issues. We had attempted to go to several ninja hours over the course of the week, but a ninja did not show up to any of them. Due to the limitations of our knowledge of Python, we knew it would not be the best use of our remaining time on the project. We also did some maintenance and planning for our time remaining before demo day, and filing down the new parts, which have stupendous designs by Mika!
-The Team
