Ramping Up
11/13/18
After going through our feedback and doing the plus-deltas for sprint 2, we realized that the area where we are most lacking is integration. We didn’t make the progress we were hoping to make last sprint, and this is in part due to the fact that we weren’t able to connect each of our individual components together, especially because we were falling behind on personal work, and couldn’t integrate unfinished pieces. It was these failures that we decided to rectify with our new kaizen:
“Integrate from the start, front-load individual work, keep team health in mind.”
In order to hold ourselves to the integration part of the kaizen, we made a secondary goal to do an integration test every time we met. We are hoping this can help us address problems and effective solutions more quickly.
-Katie
11/13/18
We’ve made a lot of progress on the code today—the MIDI team found an upperclassman who had previously worked with MIDI. Huge shoutout to Nick Steelman, who was willing to give us access to his code, and explained to us what it did! With this in hand, we’ll be able to convert MIDI files into something that can be interpreted by the Arduino, which we’ll begin to integrate when we next meet as a full group, during class tomorrow.
I also met with Jessie to work on the website. It seems a bit of a far-off thing to be working on now, but in the beginning of the project, we agreed as a team that we wanted to focus on presentation, and the best way to have a sharp-looking website is to start early! While I have done web design before, I’ve never directly interacted with HTML, but diving in headfirst has been a refreshing challenge. I’ve spent a good amount of time working on the branding of our presentations before, and so I’m taking the initiative to edit the framework Jessie laid out and make it fit our previous looks.
-Mika
11/27/18
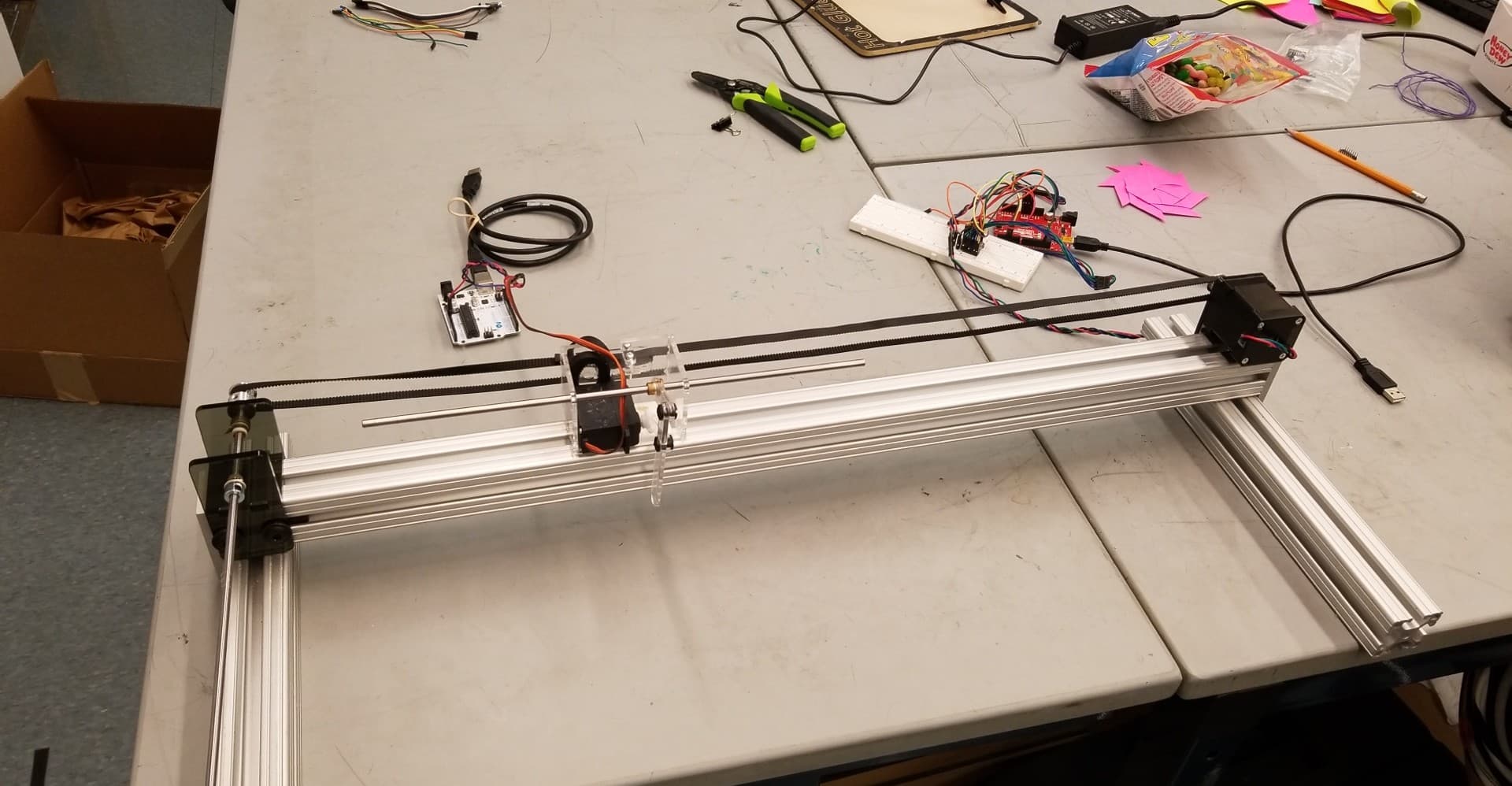
Even though we didn’t plan on working over Thanksgiving Break, all of us volunteered to do some extra, so when we met up again in class, we had a lot to integrate. We have our device set up, and we received a new motor shield we are trying to integrate, to try and prevent the overheating we noticed earlier. The motor shield is specifically designed to work with stepper motors, so we will have to reach out to our professor, Stan Reifel, to see if we can get it to work with our servo motor as well. The new motor shield uses less current than our old one, and doesn’t smoke after use, which is a great improvement.
Our mechanical subteam also made progress on their drafting, and laser-cut a new motor housing.
-Katie
After class, I met with an instructor, who helped me understand the connections made between the motor shield and the Arduino, and to find the ideal current for our system. I was then able to attach our servo finger and stepper motor to the Arduino, and combine our various codes to make them work together. I then spent my time cleaning up the code, which is now a lot easier to read thanks to the simple nature of the SpeedyStepper library.
-Jessie
11/28/18
Today, we integrated our physical system and tested it with a song that Jessie hard-coded: Happy Birthday. Our robot, lovingly dubbed “Jo-Hangry,” (a combination of the name Johann and hanger, what we’re pretty sure is it’s predominant emotion,) played the song without skipping a beat or missing a note. The song plays satisfyingly fast, something that we were worried about when deciding to make a gantry. We are delighted to have this MVP and have decided to meet for an hour tomorrow to make our presentation for the sprint 3 design review on Friday.
-The Team
11/29/18
We got together at 7pm in the PoE lab, as planned. Today our focus is on making the slideshow and printing out a fresh new box to house the finger. We finished the slideshow and agreed on who is presenting which slides, and Kyle agreed to stay late to assemble the last iteration of the mechanical system. While we do have a video of our MVP functioning, we decided to come to class fifteen minutes early tomorrow to get a video our our robot playing piano with its new finger box, to keep our presentation as up-to-date as possible.
-Katie
11/30/18—Morning
We arrived to class 15 minutes early to record a video of our brand-new finger box playing Happy Birthday, as agreed upon yesterday. We did have a bit of last-minute trouble uploading our video to YouTube, but we managed to get it resolved by the time we presented. The presentation went as planned, and we got lots of useful feedback. We all closely watched the other teams presenting and provided them with useful feedback as well. For the last few minutes of class time, we tidied up our workspace and brainstormed about what our meeting this evening should focus on.
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)