Getting our Bearings
10/26/18
As we headed out of sprint 1, we put our heads together and decided to list the things that we thought went well, and the things that didn't. We came to realize that a majority of our issues stemmed from the way we were dividing tasks—with our old method, it was hard for us to trust that anyone else was doing their fair share of work, and with our inability to properly timebox our work. After brief discussion, we agreed that starting a Trello board to help with these issues would help solve the problems created. We then created a team kaizen, to hold ourselves to the goal:
"To increase efficiency and team understanding, we will commit to timeboxes, Trello, and team health."
With these goals in mind, we think that this sprint will be productive. It's been a bit of a bumpy road so far, but once we are able to better coordinate between all of our individual tasks, we should be better off in general.
-The Team
10/30/18
It's been a while since we last checked in! We had been busy preparing to present our progress from the first two week sprint. We presented on Friday and got some great feedback. Our finger can strike and rest at different rhythms. For this next sprint, we are working on incorporating MIDI to control the rhythm and notes, and also on potentially getting our finger to slide up and down the piano. Today, we ordered parts for the sliding gantry system, and continued our research on MIDI. We also had a team discussion, and are hoping to bolster our team health by incorporating a trello backlog, and going on a team bonding event. This should allow us to work with increased efficiency and to enjoy the process more!
-The Team
11/4/18
We've spent most of the last few days waiting for parts, and now we're finally receiving them! Our MIDI team downloaded software, such as MIDO, a library that allows Python to parse MIDI, and MIDI-OX, a tool that translates a MIDI file into a text document. They also developed some pseudocode with a class teaching assistant, to potentially allow communication between the MIDI files and Arduino. Our motor team began some work on the website and sprint 2 presentation while waiting for a motor driver, and then adjusted the limiting current on the motor driver and began coding the stepper based off a simple example from HowToMechatronics. Our mechanical team has been hard at work designing the ideal gantry system for our project. We are looking forward to seeing it all come together soon!
-The Team
11/5/18
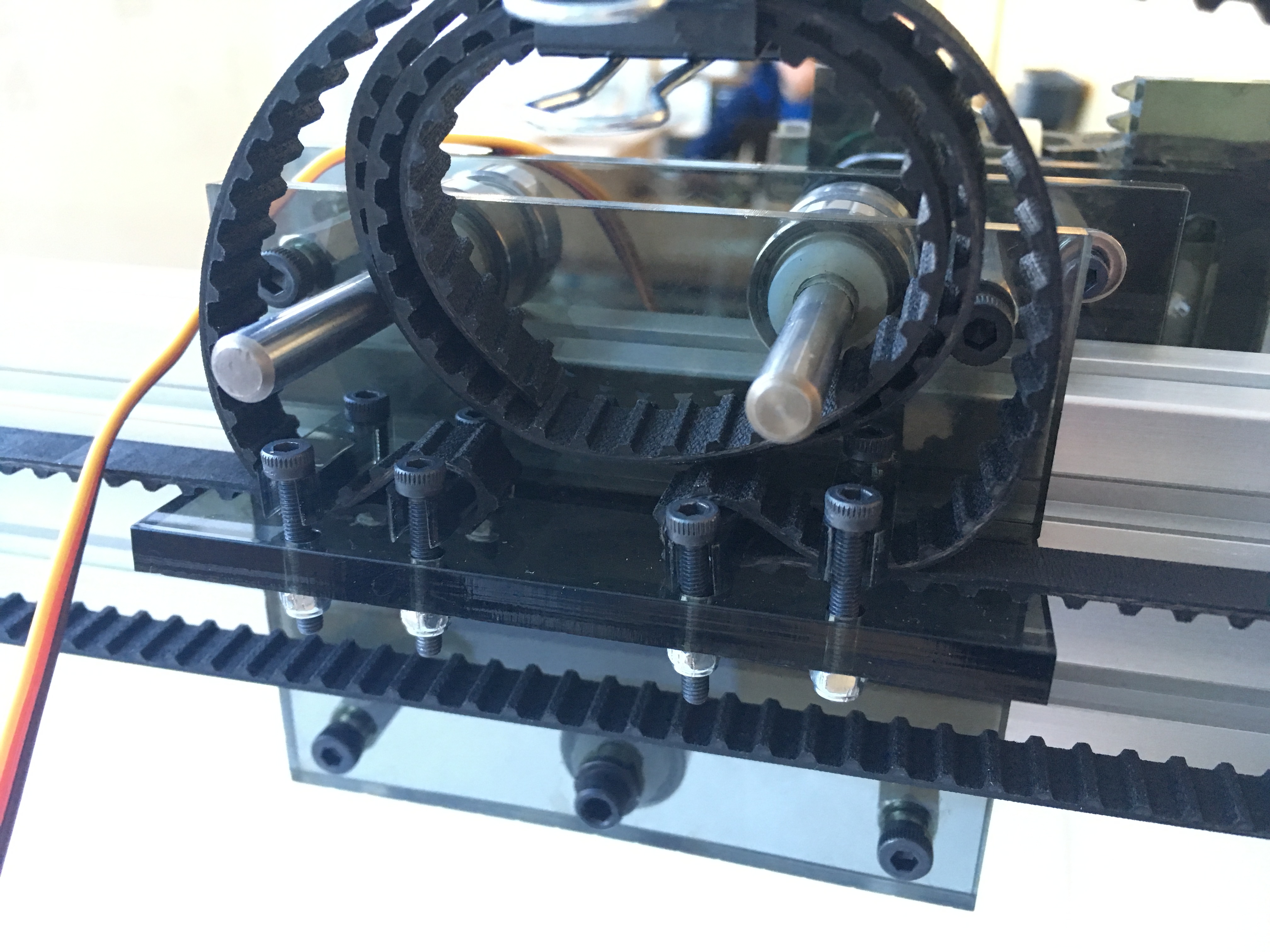
Over the past few days, the mechanical subteam has been hard at work, ideating and designing our gantry system. Most gantry systems are driven by either a leadscrew or a belt. For our system we decided to go with a belt, as it will allow our finger to move at greater speeds, benefiting our sound quality. For the base structure of our gantry, we quickly decided on creating a base out of 80/20 (a type of aluminum framing system), as it allows us to iterate on the base, and we had the material readily available. As for the carriage, we spent a while ideating on the ideal system. We initially considered using two supporting rods with linear bearings, however there is a risk of the bars bending, especially over an extended distance. In the end we decided to use linear bearing pads that are specifically made to work with the 80/20. With the gantry system underway, we are ready to start working on the finger!
-Kyle

.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)
.jpg)