
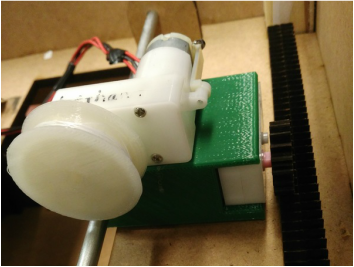
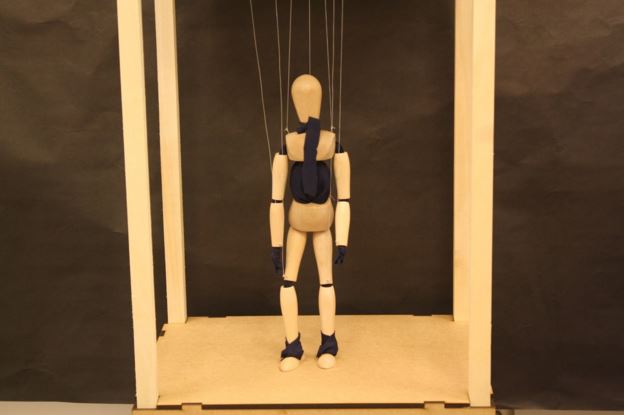
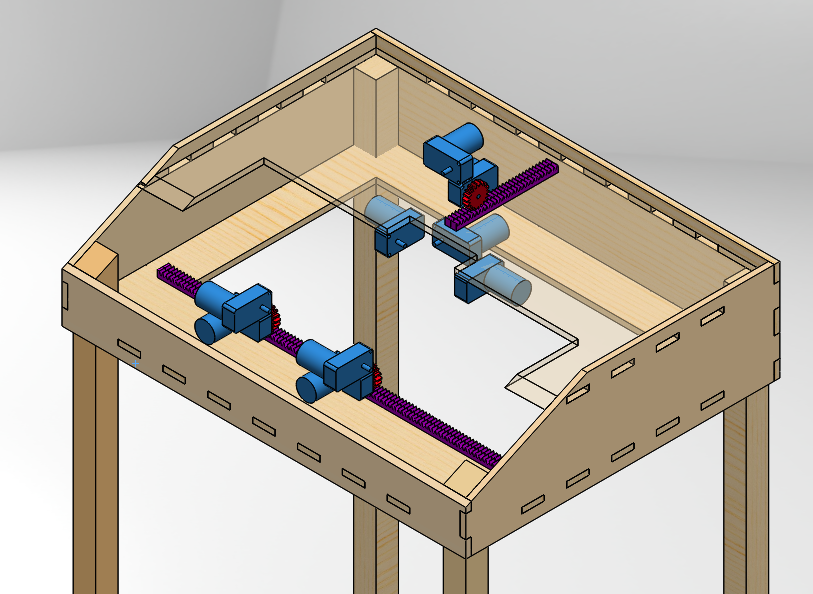
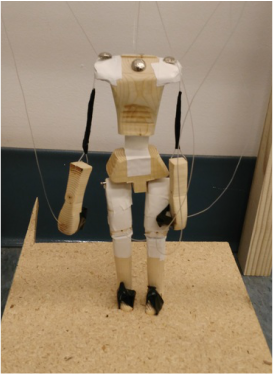
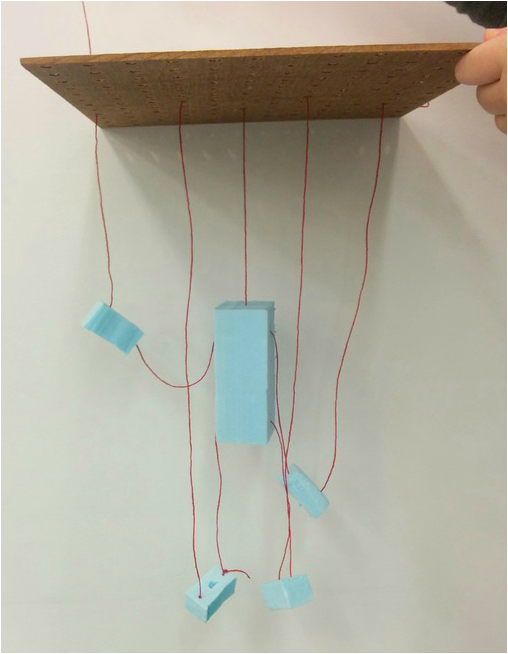
In the final sprint, we assembled our final marionette and electrical systems and tested them in conjunction with the code; we finalized the mechanical design, which was mostly the same from last sprint, and constructed the final marionette and case. A major design change this sprint was switching from a two motor plate design to a single motor plate design. We did this by only using the the rack and pinion system for the lateral motion in the arms, instead of arms and torso. The rack and pinion system works as expected, although occasionally over or undershoots slightly due to the low quality of motors used. A major takeaway for a future team building this project is to use servos or less cheap motors because they are able to be more accurately controlled.
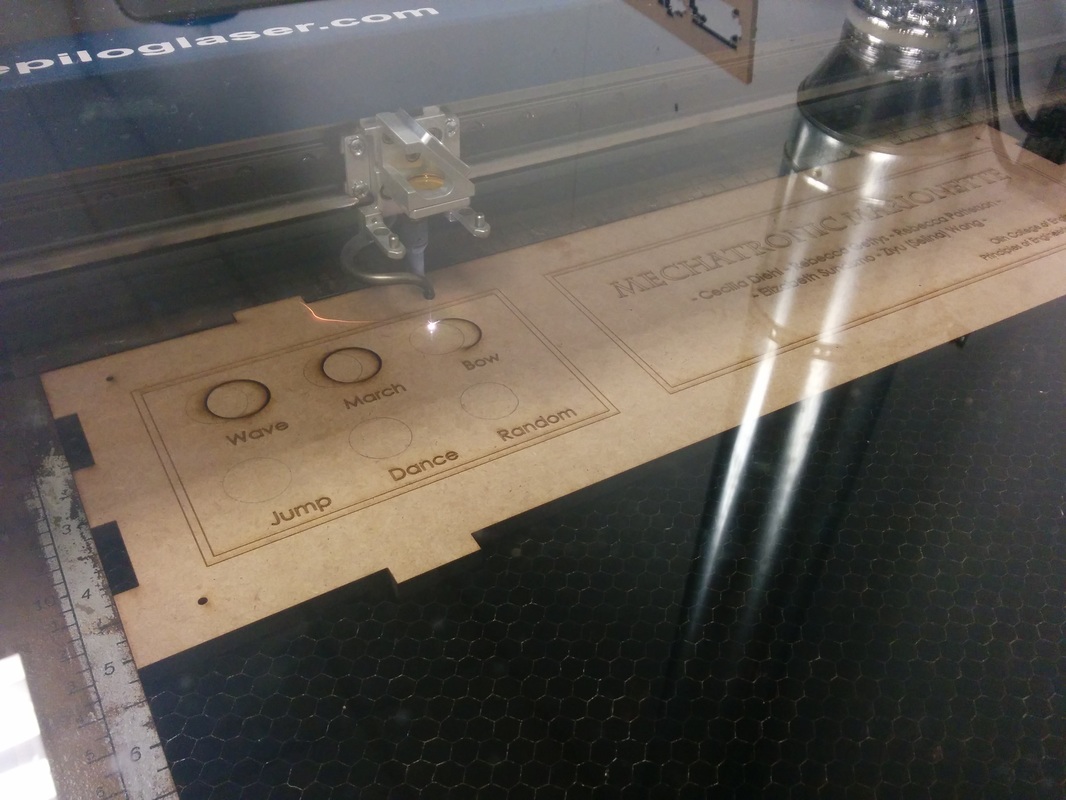
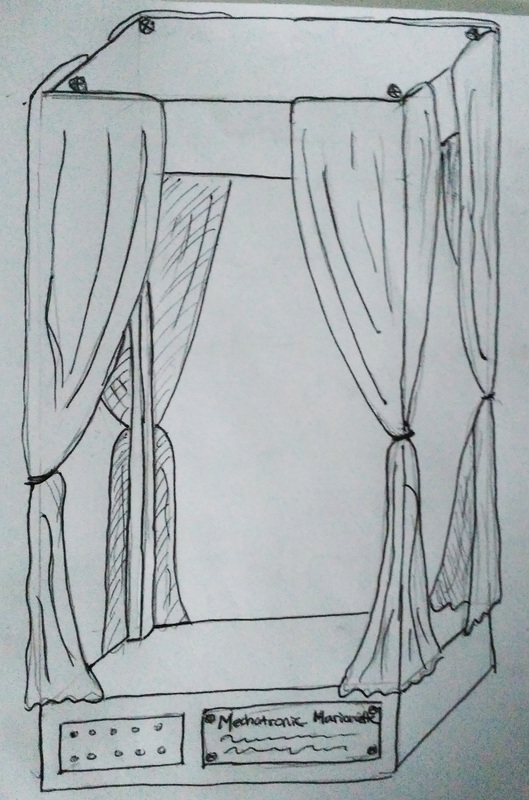
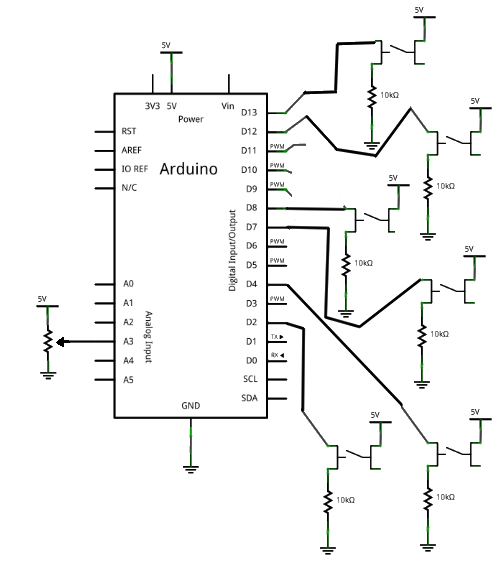
With the mechanical system complete, we calibrated the code to control the motions correctly via the motors and rack and pinion. We also tested that the new buttons worked with the rest of the electrical system and resulted in the production of the correct motions (we made sure that the 'jump' button didn't cause a 'march' motion when pressed). We also switched over from a breadboard to soldered electrical components for a more durable end product. We created the decorations for the marionette case and hid the electrical and mechanical components within the top and bottom of the case so that they would not detract from the aesthetic. Lastly, we finished the website and documentation, so that future teams can see what we did and how we did it. Because we continously integrated throughout our previous sprint, most of the work in this sprint was simply assembling and testing new components against each other and smoothing out flaws.
With the mechanical system complete, we calibrated the code to control the motions correctly via the motors and rack and pinion. We also tested that the new buttons worked with the rest of the electrical system and resulted in the production of the correct motions (we made sure that the 'jump' button didn't cause a 'march' motion when pressed). We also switched over from a breadboard to soldered electrical components for a more durable end product. We created the decorations for the marionette case and hid the electrical and mechanical components within the top and bottom of the case so that they would not detract from the aesthetic. Lastly, we finished the website and documentation, so that future teams can see what we did and how we did it. Because we continously integrated throughout our previous sprint, most of the work in this sprint was simply assembling and testing new components against each other and smoothing out flaws.











 RSS Feed
RSS Feed