Sprint 1
Sprint 1, we feel, was overwhelmingly a success. At the end of this sprint, we had felt on top of the world and like our vision was really coming together. We were initially worried about our team dynamic as a ‘friend’ group, but this sprint really proved that we could work well together and get something accomplished. Note that this comment is not meant to be a foreshadowing comment - our team dynamic did manage to stay healthy, but individually our work habits became less and less conducive to our personal health.
This sprint served as the beginning of this whole adventure! We met our teammates, immediately began to brainstorm projects, decided on team goals, our SCRUM process, and personal goals. We also were able to lay out a flexible schedule with important deadlines for the rest of the project.
Though we had decided on a robotic arm, we had to actually layout subsystem tasks. This proved to be a difficult endeavor - the way we scoped out our project meant that the mechanical subteam had a lot to do initially, and that software should come later. Looking back at this now, we realize that this meant that our scoping of the project in terms of subsystems should have changed at this point. Although it’s nice that we decided so early, not changing the way we scoped our subsystems as a team when we realized that not much had to be done otherwise became problematic later.
We also decided some team process things, namely meeting times and dedication to the project. The name “DeGra” came from here - we felt our motivation would reach “De(ep) Gra(ve)” status. We also decided on Saturday 9 AM working meetings, with check-in meetings every Monday night at 7 PM, and Team Health meetings every Wednesday night at 7 PM. We did not talk about team bonding - this would have been the sprint to do team bonding, but unfortunately we dropped the ball on that.
Mechanically, we set out on the ambitious goal of creating three separate types of mechanical fingers to develop a better understanding of what we were getting ourselves into. We wanted one of them to be a rigid interesting mechanical design, one to be soft robotics design, and one to be partially rigid and partially compliant. We unfortunately weren’t able to create the soft robotic finger; we decided to prioritize our partially compliant fingers due to the early success we saw with them.
We were able to create an arm for a claw like hand that used the partially compliant fingers. Our electrical/integration team worked hard to integrate linear actuators into the arm, which was how we curled the fingers. They also integrated touch sensors and IR sensors which allowed us to autonomously pick up objects and know when to stop picking them up. The software team wrote control code for linear actuators, and code that takes IR and touch sensor input and changes output.
We worked really effectively, and as a result got a really good end product with three fingers and a palm/arm to mount them on. They were fairly reliable in terms of gripping. In terms of gripping effectively to keep an object picked up - it was more variable. However, it could easily pick up light and large objects. This was due to an iterative process of building on the mechanical system. Software and electrical happened very late in the game, and it’s a wonder we were able to get the robotic arm effectively actuated even though we couldn’t even integrate until Thursday night. Our actual Sprint 1 presentation for the Sprint review was done pretty early on and was well communicated. This was reflected in our Sprint feedback, which was fairly positive about the outcome of our project, and only included minimal deltas about going forward with our project. Yay success! But celebrating this early was something we did too soon . . .
Click here to see the slides from our Sprint 1 Design Review:

Team Goals we created for ourselves during the first meeting
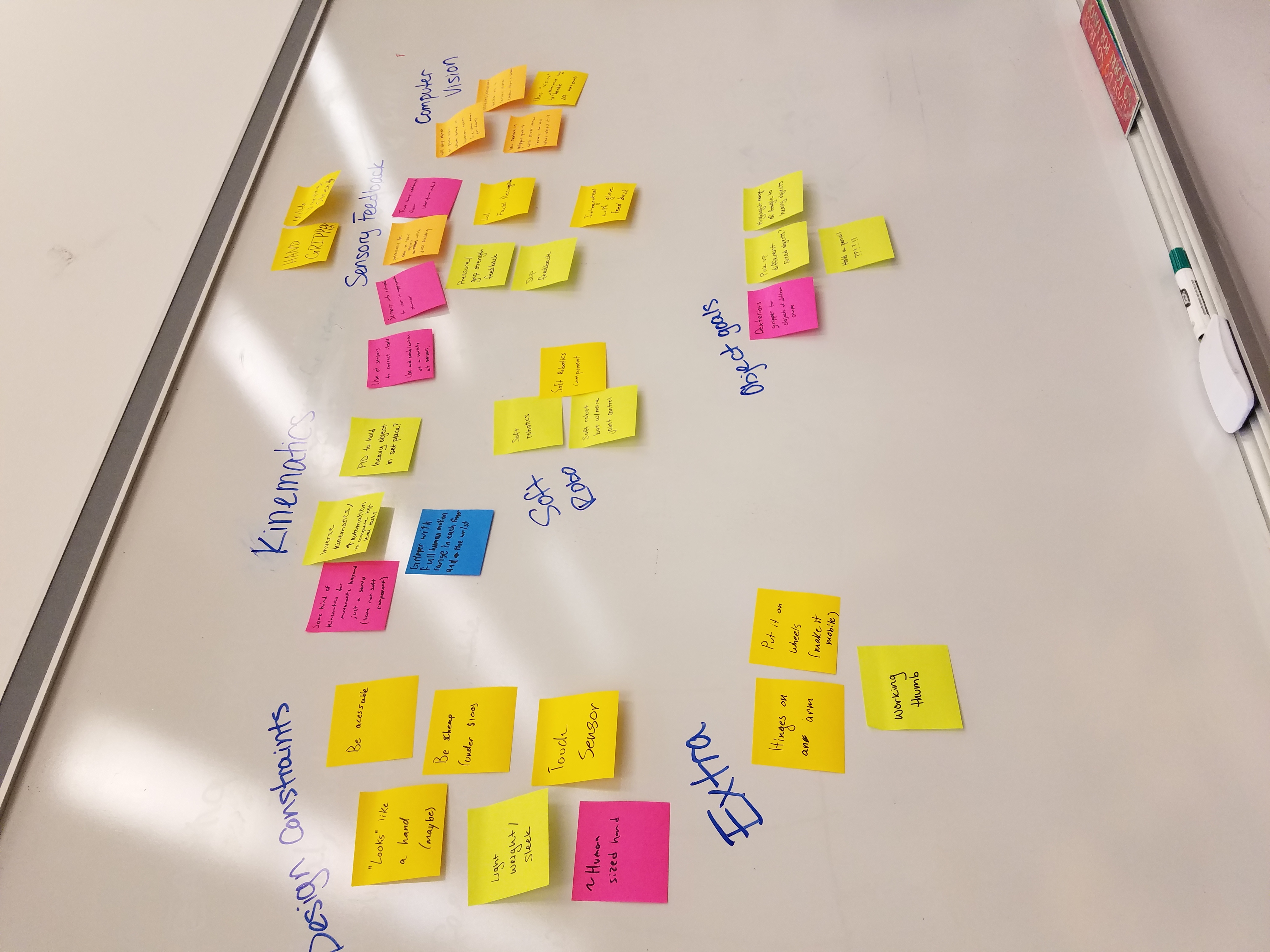
Brainstorming session for our project
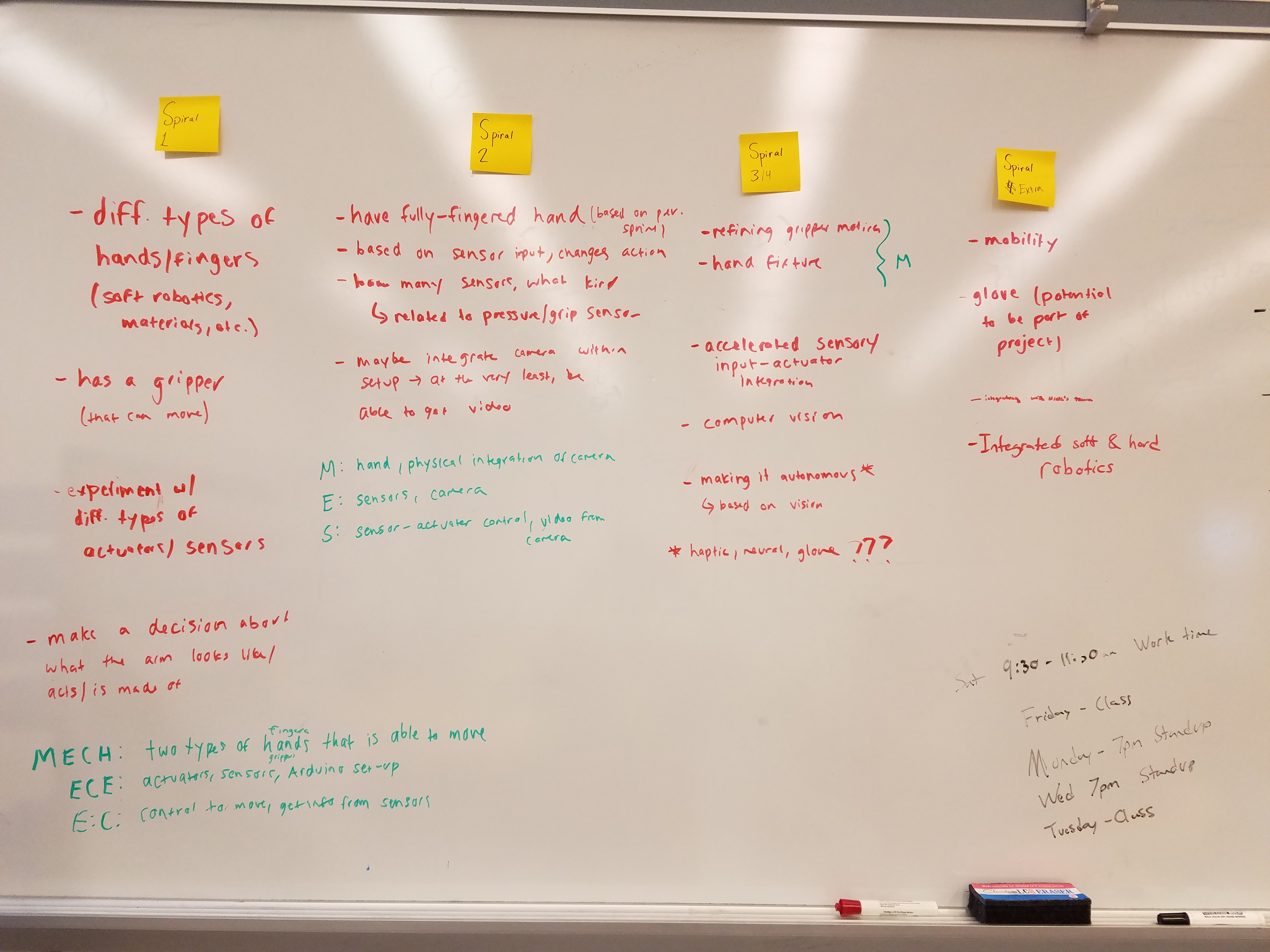
First iteration of our schedule for the project.
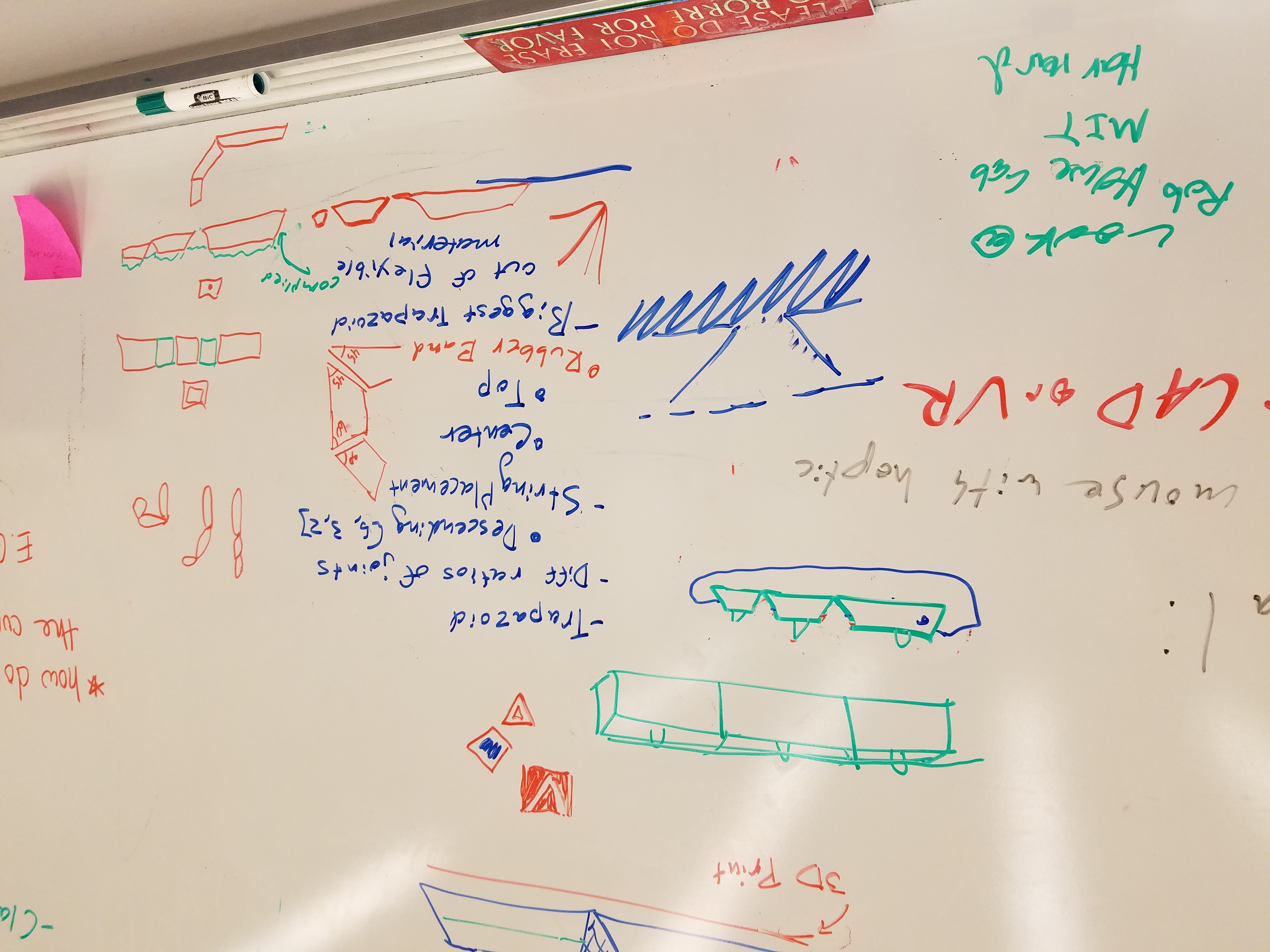
Brainstorming for the partially compliant finger

CAD for the rigid fingers
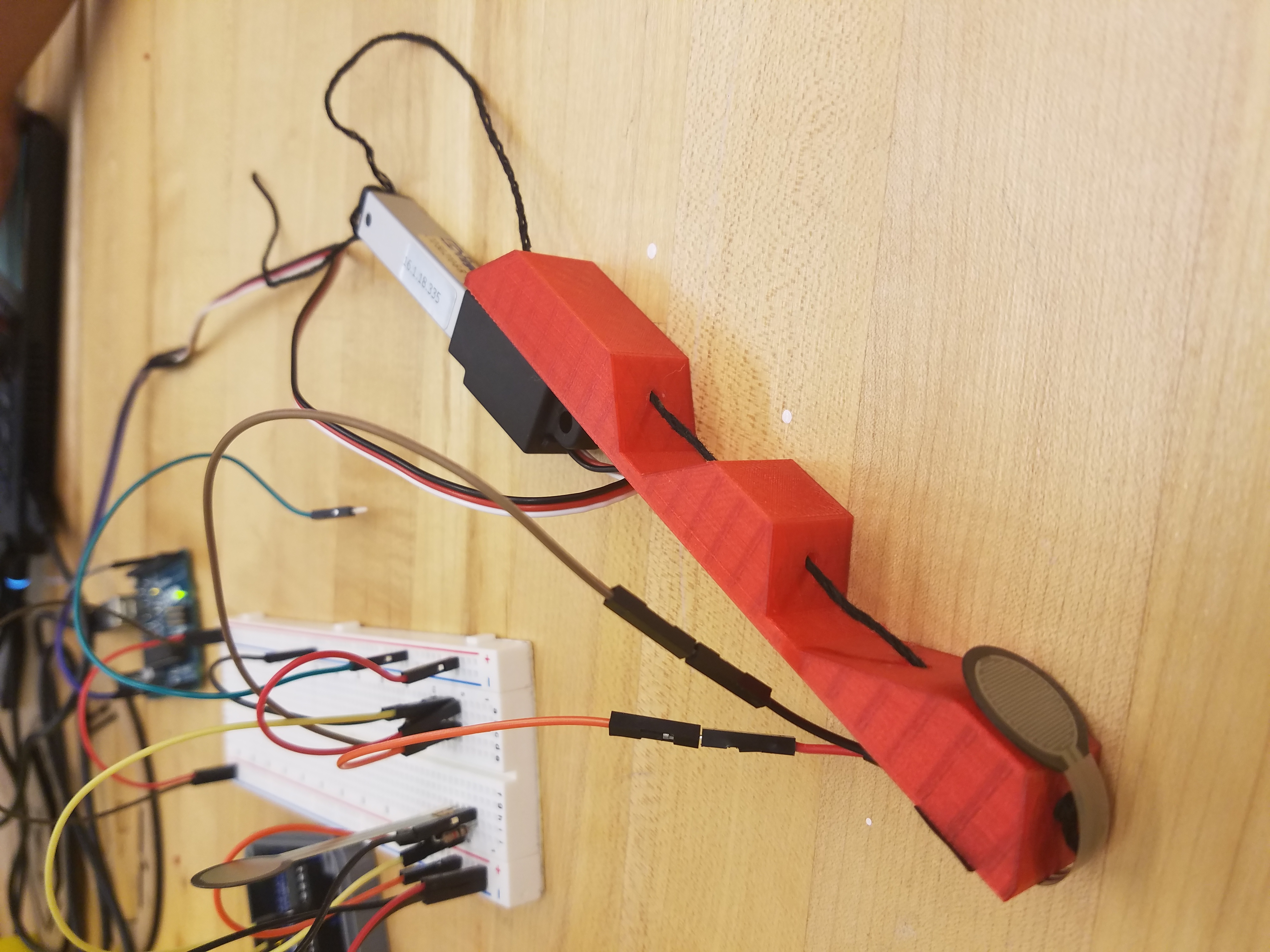
Partially compliant fingers connected to a touch sensor and linear actuator.

Team members working on integration.