MECHANICAL SUBSYSTEM
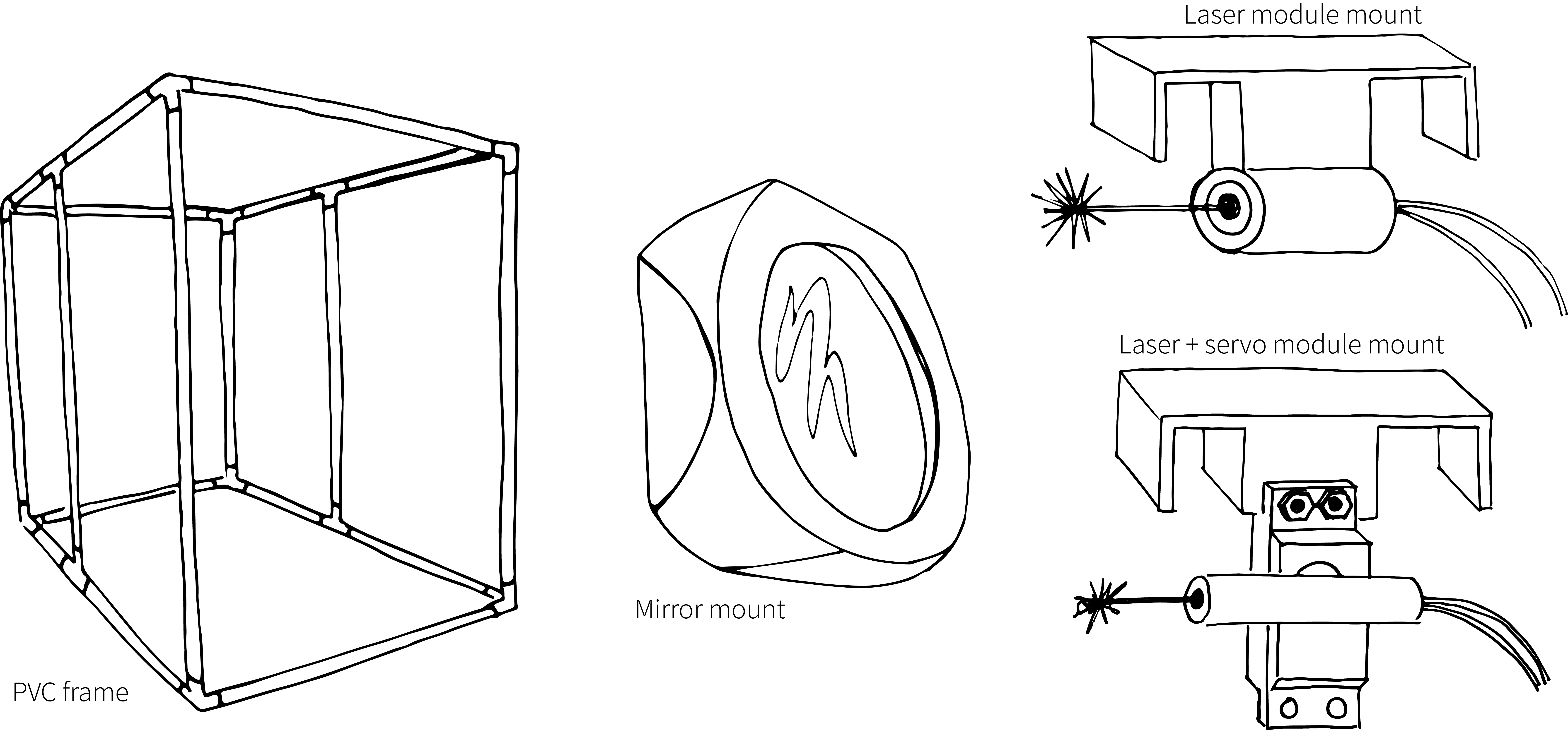
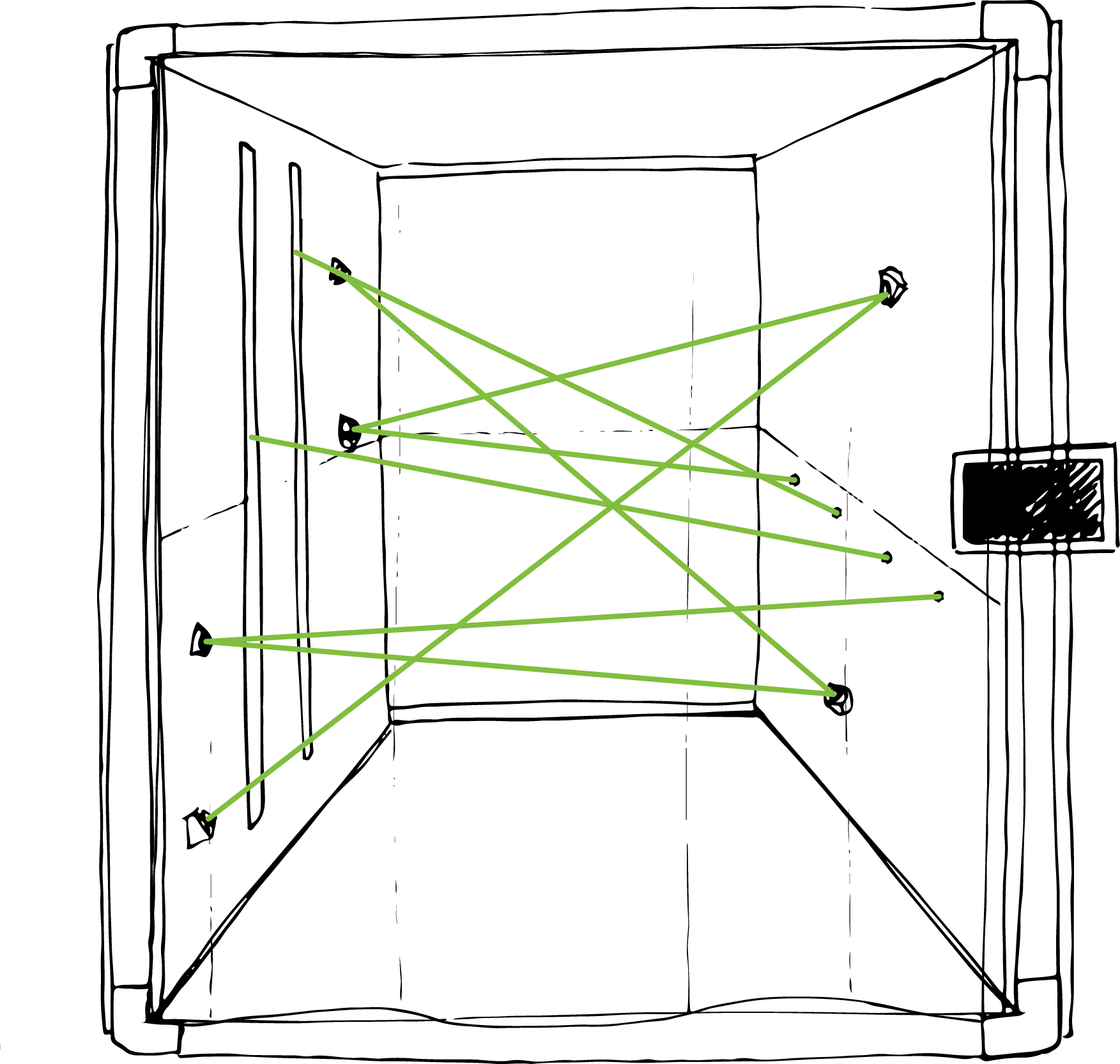
The mechanical system consists of 4 main components; the PVC frame, the cardboard walls, the mirrors and the lasers. The PVC frame is a 8’x7’x5’ box, with vertical supports on the left and right sides. The supports also act as attachment points for the cardboard walls. The 10 sheets of ¾” cardboard are connected to the PVC with loops of Velcro, making for easy removal and storage. The walls also make it easy to cut openings for the lasers beams to come out of. There are 4 lasers, two of which are mounted on servos so they can move vertically, increasing the difficulty of the maze. The wiring for the lasers and sensors fits in between the double sheets of cardboard that make up each wall, making for easy storage. In order to get an increased number of beams without increasing the number of lasers, we mounted mirrors at different angles on the walls. The mounts are 3D printed to specific angles, to make the best pattern of laser beams to improve gameplay. The angled mirrors cause the beams to bounce back and forth across the box, creating the maze. We use a fog machine to create the particulates in the air needed to make the lasers visible.

 PVC frame; individual laser module mount.
PVC frame; individual laser module mount.
ELECTRICAL SUBSYSTEM

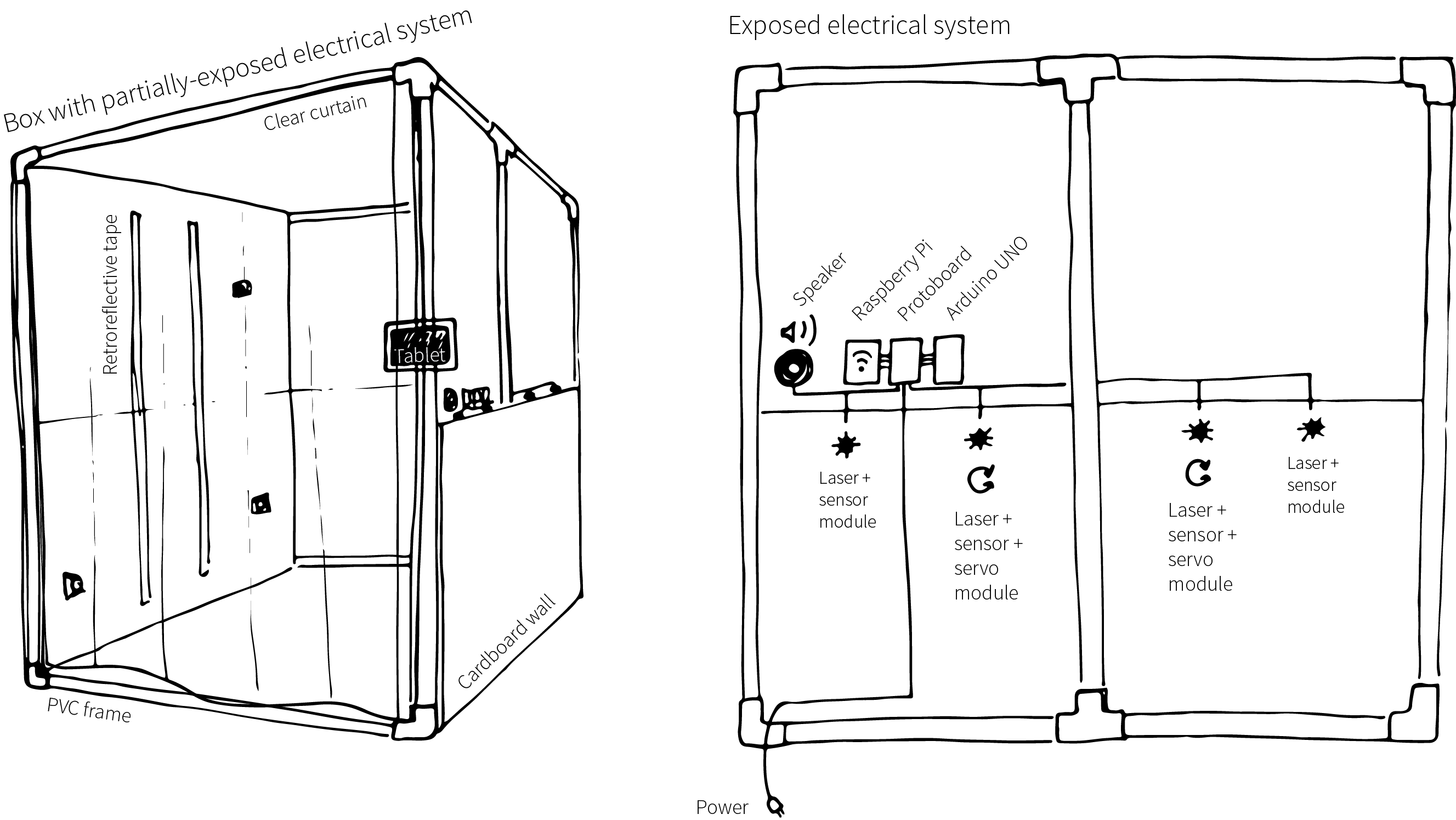
The main electrical components are the lasers, the photodiodes to detect breaks in the lasers, and servos. These are all interfaced with an Arduino Uno and Raspberry Pi B+. You can read more about the Arduino and Raspberry Pi code in the firmware section.
Lasers
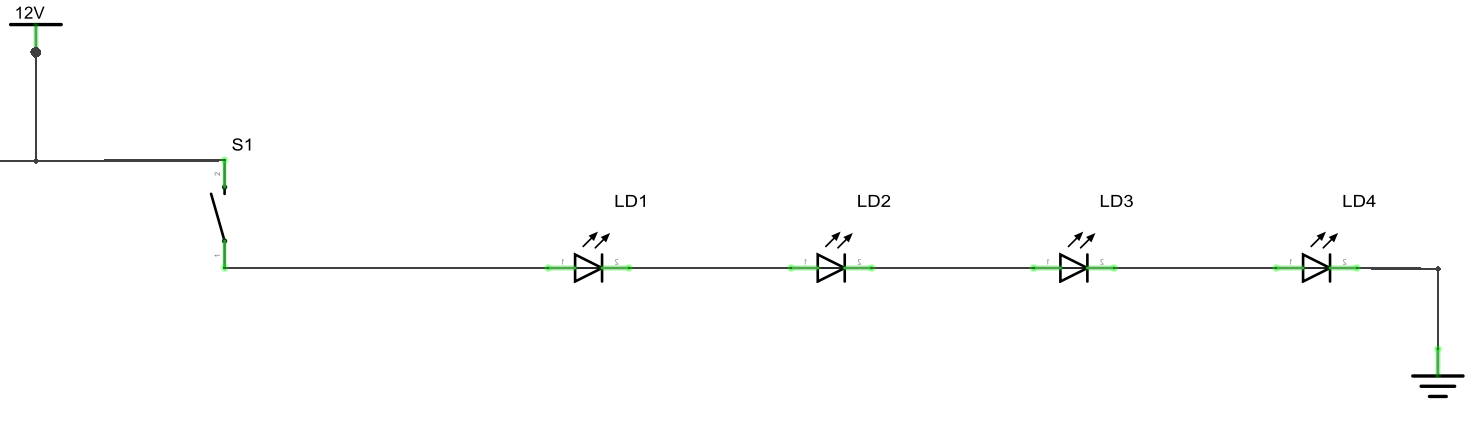
Our gameplay is built around the four green laser modules, which are installed along the wall at regular intervals. Each laser requires 2.5V-4.5V and 300mA, so we wired the four lasers in series to our 12V 5A DC power supply. This supplies each of the lasers with 3V, and more than enough current. The lasers are also wired in series with a mechanical push-button as a safety on/off switch, so that they can be controlled separately from the rest of the electronics. A circuit diagram of just the lasers and pushbutton is below:
Photodiodes and Servos
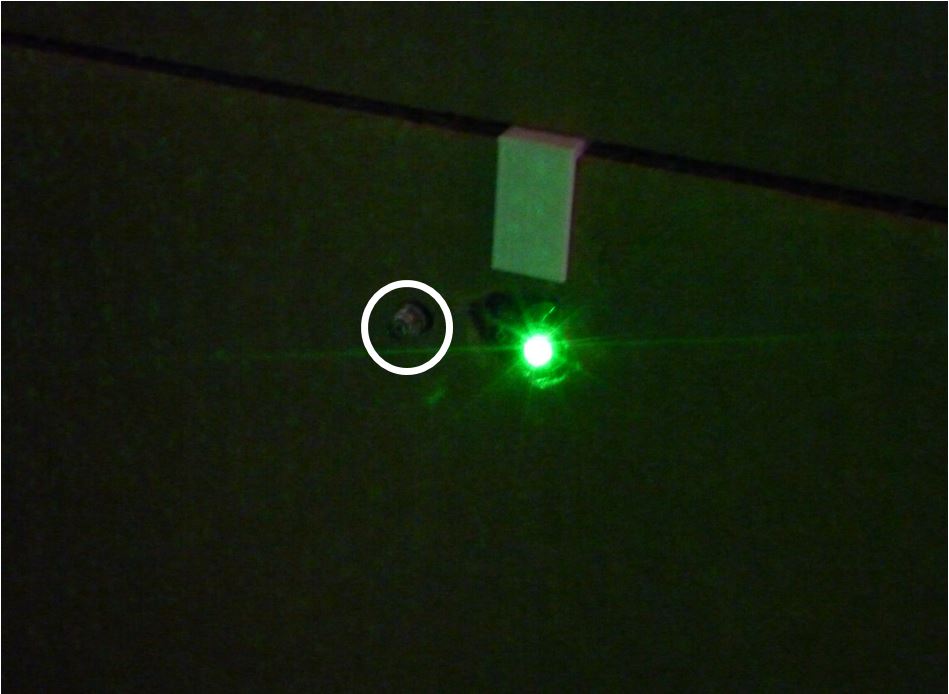
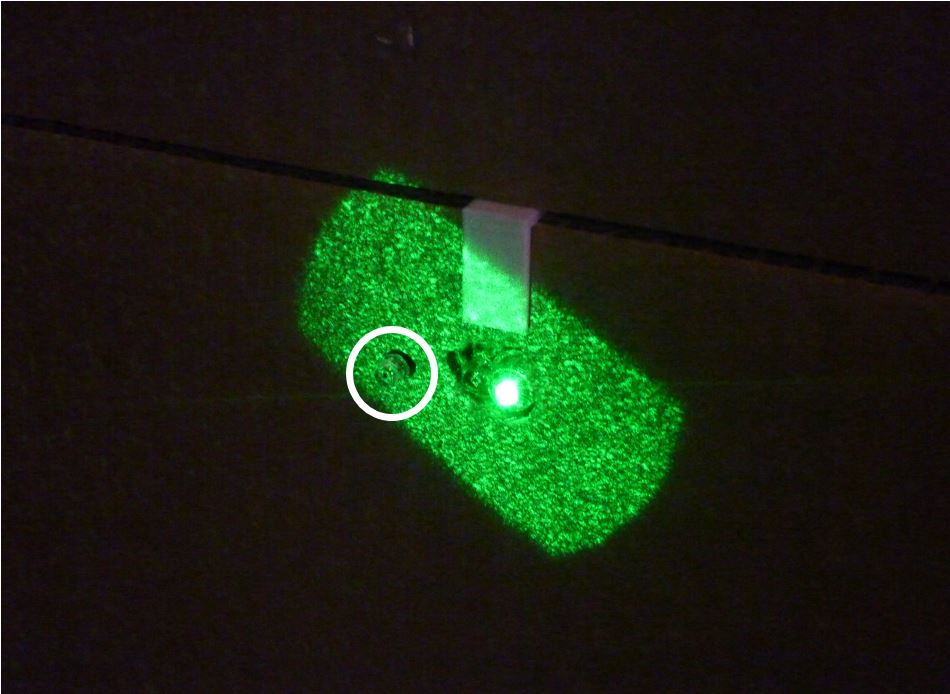
In order to detect when the laser beam has been broken, we added photodiodes next to each of the lasers. When the laser beam is not broken, it reflects off a piece of retroreflective tape at the end of the beam, which reflects a small circle of scattered light back around the laser. As a result, the photodiode is also lit. However, the scattered light is blocked when the laser beam is obstructed, so the photodiode is dark. Photodiodes produce a current by absorbing photons, so more light on the photodiodes correlates to a higher current and voltage. We read this voltage through the analog input of the arduino, and used the readings to analyze whether the laser beam had been broken. You can read more about this analysis in the firmware section.
These two images show the scattering from the lasers after being reflected off the retro-reflective tape. When the laser is broken, there is no scattering reflected, so the photodiode is not lit. The photodiode is circled in both images. The light from the scattering creates a current through the photodiode, which is read by the Arduino.
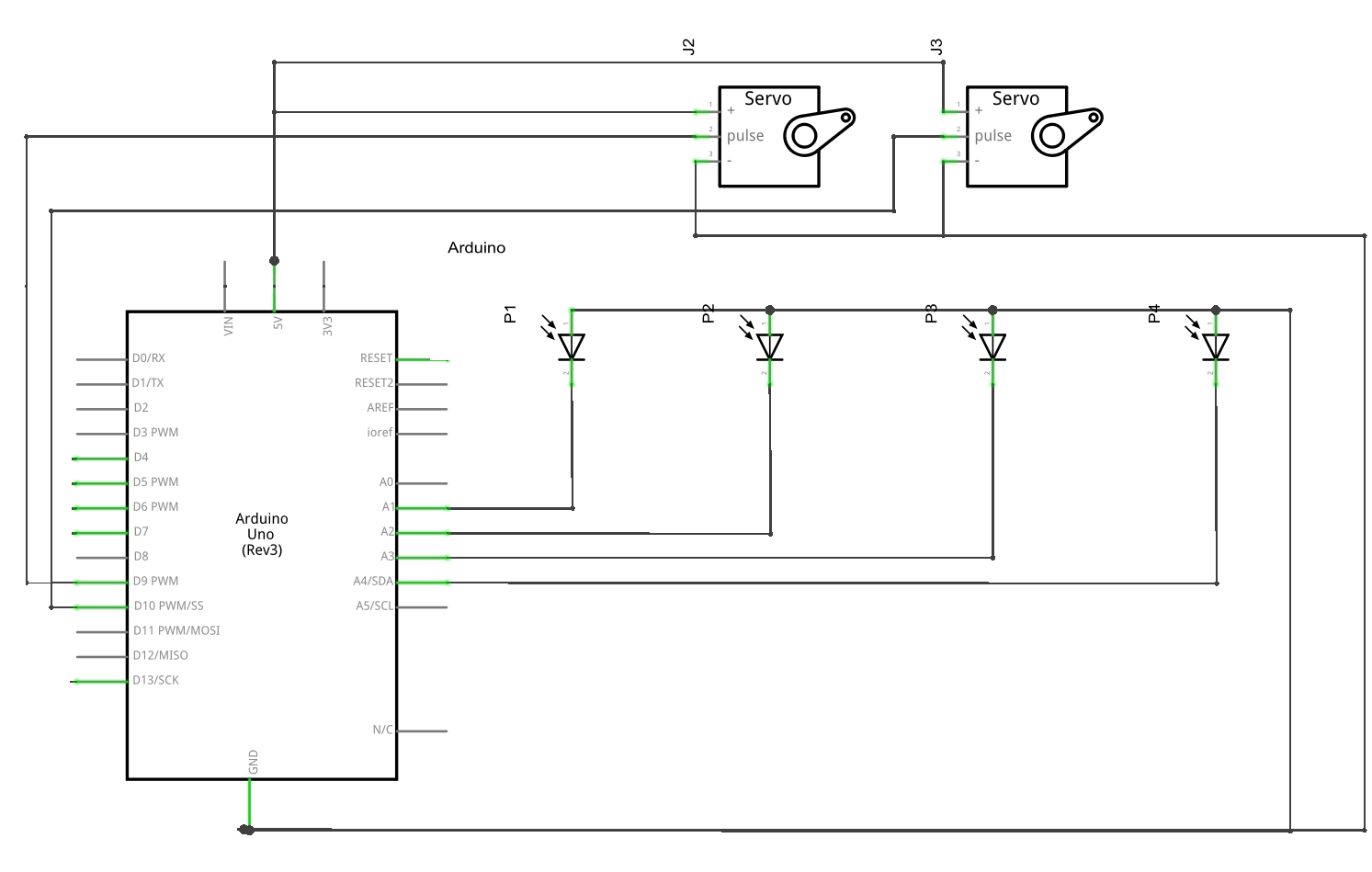
Two of our lasers are mounted on servos to add moving beams to the game. The servos are powered and controlled through the Arduino, and move at a fixed rate over a limited range of angles. Both of these parameters are set in the Arduino code. In order to control difficulty, we can control whether or not the servos move based on a digital signal from the Raspberry Pi. When the Arduino receives a high voltage from the Pi in pin 13, then the Arduino will move the servos.
This part of the circuit diagram shows the connections between the photodiodes, servos, and Arduino.
Hardware Communication
We are using both the Arduino and Raspberry Pi as onboard processors, because the Pi is necessary for communication to the web-app, while the Arduino is necessary for analog input readings. Since the main gameplay is controlled through the Pi, we are using hardware connections to communicate between the Arduino and Pi. Since the sensors are an analog input, they must be read through the Arduino. Then, each time the sensors detect that a laser beam has been broken, the Arduino sends a high digital voltage to the Pi. In addition, the Raspberry Pi has a digital output pin to the Arduino to control whether the servos should be moving. The Raspberry Pi is also connected to the reset pin of the Arduino, so that the sensors can be re-calibrated at the beginning of each game. As a dependency of this communication, the ground on the Arduino and Pi must be connected for a common reference point.
Power
In order to make the laser maze a stand-alone module, all the power for the electrical components needed to be supplied through a single wall outlet rather than USB inputs. We used a 12V 5A power supply to convert the wall outlet power to DC, which is necessary for all the electric components. The 12V is used directly for the lasers. However, both the Raspberry Pi and the Arduino need 5V through a micro-USB and USB-B cable respectively. We used 5V voltage regulators to step down the 12V to 5V. The voltage regulators have a maximum amperage of 1.5A, so we needed to use two separate voltage regulators in order to have enough current for both the Arduino and Pi. The Arduino draws between 0.5A and 1A, which is comfortably within the current range of these voltage regulators, and allows enough of a margin us to drive the servos off the Arduino. The Raspberry Pi uses closer to 1.2A, so it is drawing current at the upper range of the voltage regulator. We cut two USB cables to connect the output of the voltage regulators to the power connections on the Pi and Arduino.
Installation
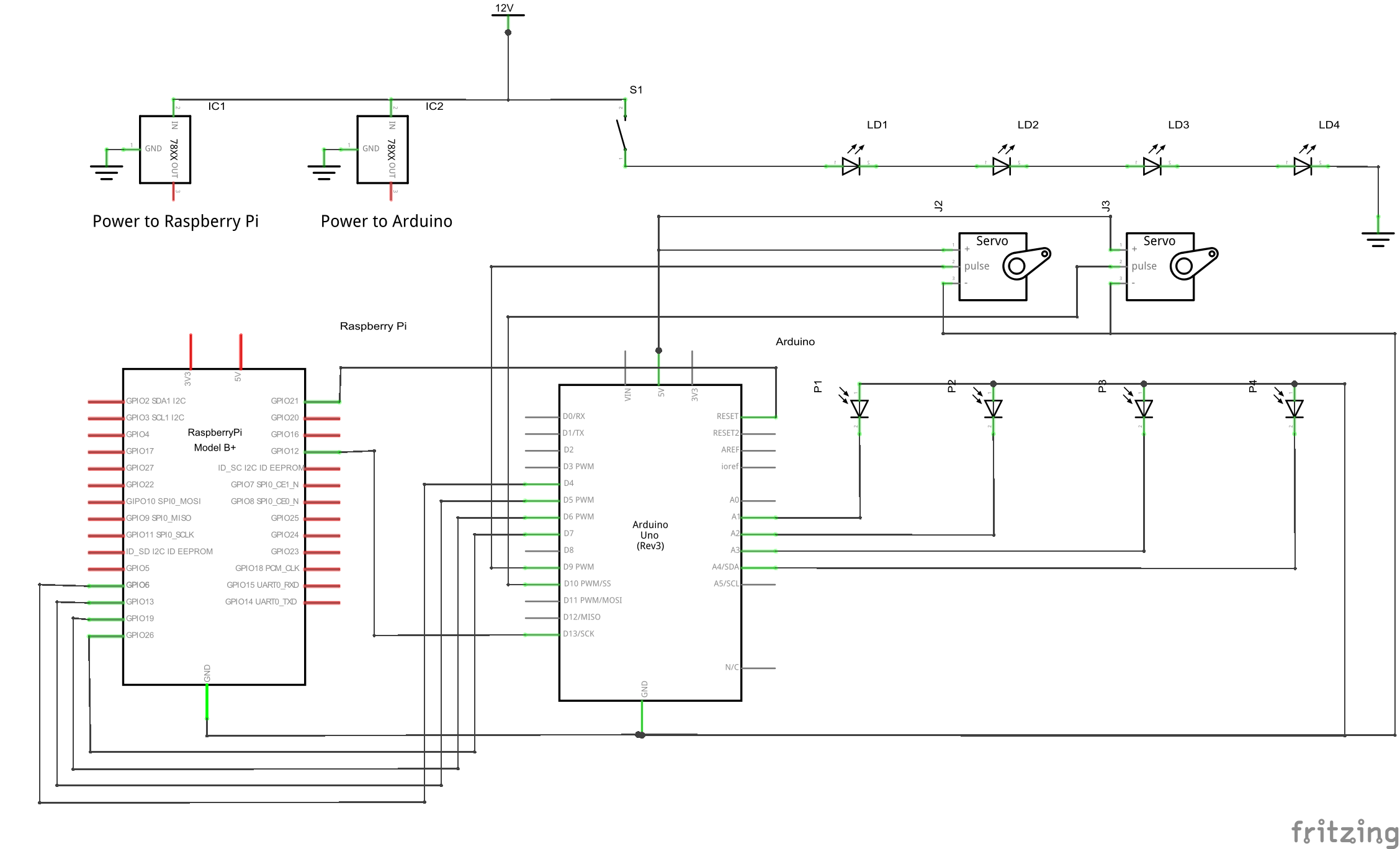
The full system circuit diagram (from combining all the previous schematics) is below:
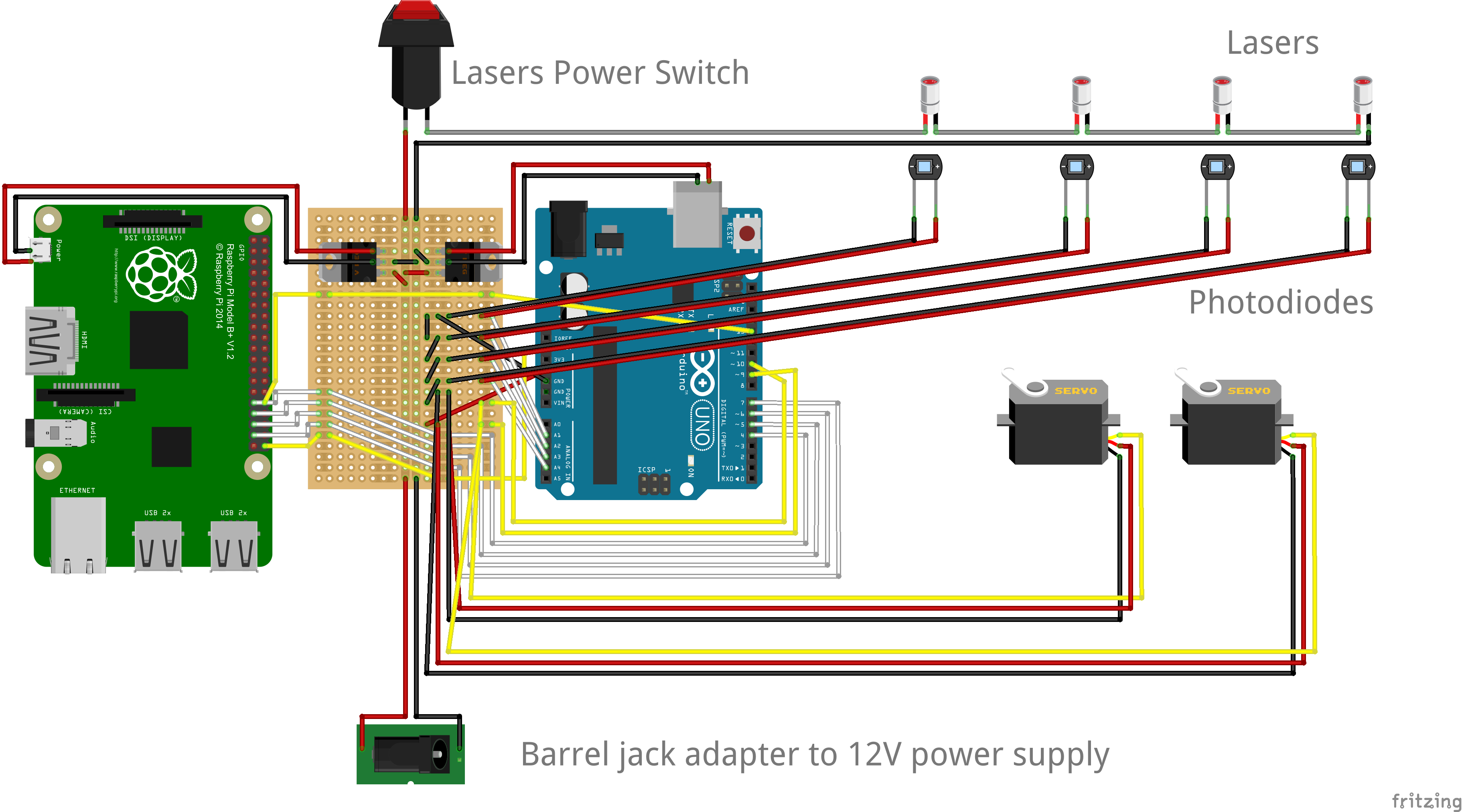
We are mounting all of the components in between one of the double walls of the laser maze box. Therefore, we combined all the electrical components onto a single proto board that connects the Raspberry Pi, Arduino, lasers, sensors, and servos. A labelled circuit layout is below.
FIRMWARE SUBSYSTEM
Our project has firmware running on both the Arduino and Raspberry Pi. The primary function of the Arduino is to read in the analog values of the sensor readings and control the servos. The Raspberry Pi controls the main game play by using python to broadcast a web-app on its server. The Pi also reads in the signals from the Arduino, to update the game state when lasers are broken.
Arduino - Sensor Readings
Since the Raspberry Pi cannot take in analog inputs, the Arduino analyzes the analog input from the sensors and puts out a simple high/low value depending on whether the laser has been broken. The Arduino continuously reads in sensor values from each of the photodiodes through different analog pins. A laser is considered broken if the voltage reading from the sensor drops below a certain threshold voltage. However, the threshold voltage is dependent on which laser is being measured (because there are irregularities in laser brightness), and also dependent on the environmental light conditions. Therefore, the threshold values are re-calibrated at the beginning of each game based on the readings of each sensor while the lasers are all unbroken. Once the sensor value drops below the calibration value by more than a certain margin (a hard-coded variable), the Arduino register a "break" in the laser.
We also conducted some software filtering on the sensor values to account for irregularities and noise in the readings. The Arduino stores a history of the previous 10 raw sensor values, and then calculates the average of those values. The average is then compared to the calibration value, and which determines whether the laser beam has been broken.
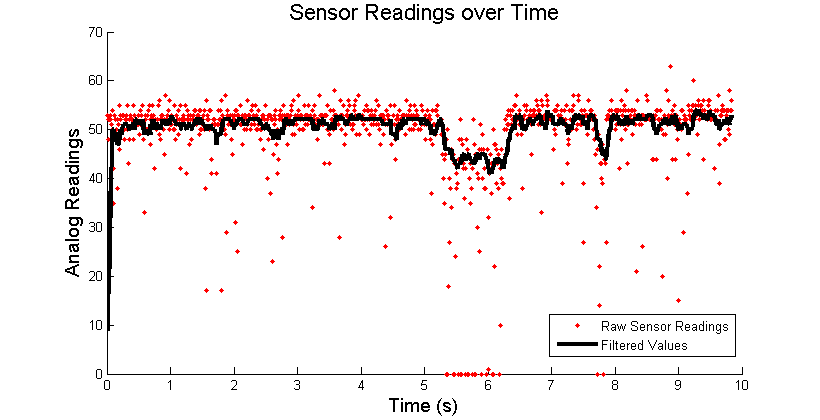
Here is a graph of the raw sensor readings and the calculated readings from the software filtering. The software filtering greatly reduces the noise in the raw data, and keeps a fairly consistent level. It is also much easier to see when the laser beam is broken using the software filtering. The laser was broken for a long time between 5 and 6 seconds, and briefly at the 8 second mark, which is shown in the two drops in the graph.
Once the Arduino detects that a laser has been broken, it sends a high voltage signal to the Raspberry Pi through the corresponding digital out pin. The Arduino will send a high signal for at least half a second after the laser is broken, and will continue to put out a high voltage if a laser is broken for an extended period of time. This is because the Pi only samples for a signal at intervals of approximately 0.25 seconds, so the output voltage must be high for long enough for the Pi to detect the break.
Arduino - Servo Control
The Arduino also controls the servos, because the Arduino receives enough excess current from the voltage regulator to drive them, while the Raspberry Pi is already using close to its maximum current. The servos sweep through a pre-defined range of positions such that they follow the strip of retroreflective tape on the opposite wall. Because the servos must change position once every loop iteration, the sweeping cannot be done in a for-loop because this would pause all sensor readings for the duration of the sweep. Instead, the servos change position with a global variable that tracks and increments the servo position with each loop iteration. In order to have the servos controlled by the Raspberry Pi, the servos only run a continuous sweep if they receive a high digital input from the Pi.
Raspberry Pi - Game Control
The Raspberry Pi runs a separate thread within the Flask python file solely to manage the Arduino input and output that determines the game state. When lasers are broken, digital signals are sent to the Raspberry Pi GPIO pins. We then use this input to keep track of how many lasers have been broken, add time to the player’s final score by interfacing with the Flask thread, and play sound output without interrupting the Flask processes. Arduino inputs such as control for the speed of the servos are output from the GPIO pins as well. The Arduino is also reset by the Raspberry Pi every time the game is restarted to calibrate the photodiode values that determine when a laser is broken.
Access our GitHub repo here.
SOFTWARE SUBSYSTEM
Flask
We used Flask to generate a web app published from the Raspberry Pi that initiates the gameplay, keeps track of and displays the play time, and stores and displays the best times for completion of the Lazer Maze. The Flask framework sends and receives information to and from the html interface, allowing us to get user input for the game such as when to start the maze and what name to associate with the player’s score. We also used the Python multiprocessing library to create separate processes managing the python game control that checks for broken lasers and plays sound output. This allows the game control to run in the background checking for Arduino input and playing sounds without freezing web app features such as the JavaScript timer. The website appearance is creating using HTML, CSS, and JavaScript.

Database
Our time database is constructed using SQLite3 to store all of our player’s names and scores. Each time the main python script is run, it opens up a database with the saved values, or creates a new database file if none exists. The web-app keeps track of the player’s name (entered through a form) and the player’s time. These two variables are then passed into the main python file, where they are written into the SQL database.

Access our GitHub repo here.