We are revolutionizing the way people play board games with the computer!
GameRobot uses computer vision and microcontrollers to control the movement of a universal gripper in 3 dimensions.
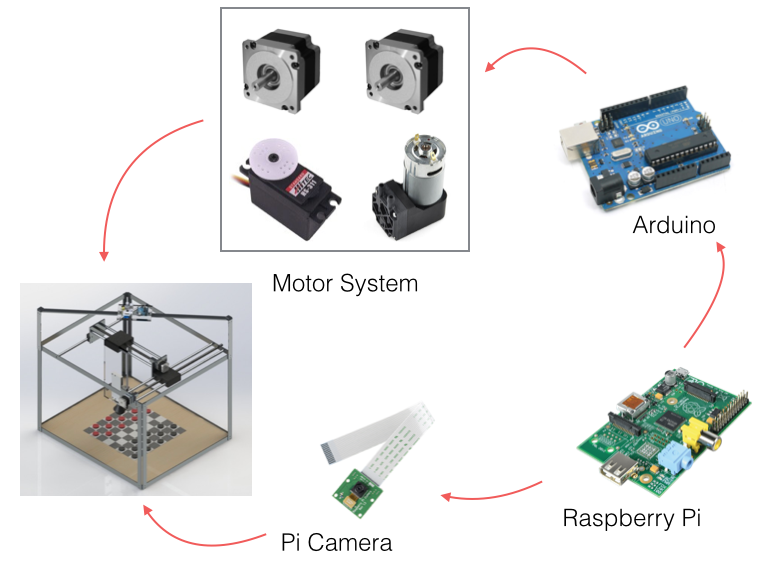
Learn MoreWe used a 3-axis gantry with stepper motors controlling the xy plane and a servo controlling the z-axis.
Learn MoreWe used an Arduino UNO microcontroller with two Adafruit Shields to provide power to our motors.
Learn MoreWe used a Raspberry Pi and OpenCV for computer vision, while developing the game framework in Python.
Learn MoreOur mechanical system is a 3-axis gantry. The x-axis and y-axis are both powered by NEMA-17 stepper motors and the z-axis is powered by a HK15138 standard analog servo motor. A Raspberry Pi with a camera and an Arduino are mounted above the system. The inside of the gantry is designed to be able to hold the game board in the center directly below the Raspberry Pi camera. The frame is tall enough to account for the Raspberry Pi camera’s range, while still being high enough that the user’s game experience is not impeded by the frame being in the way.
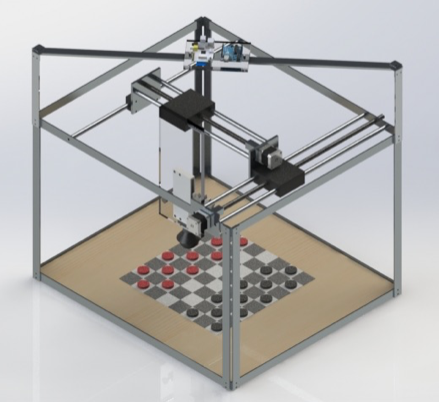
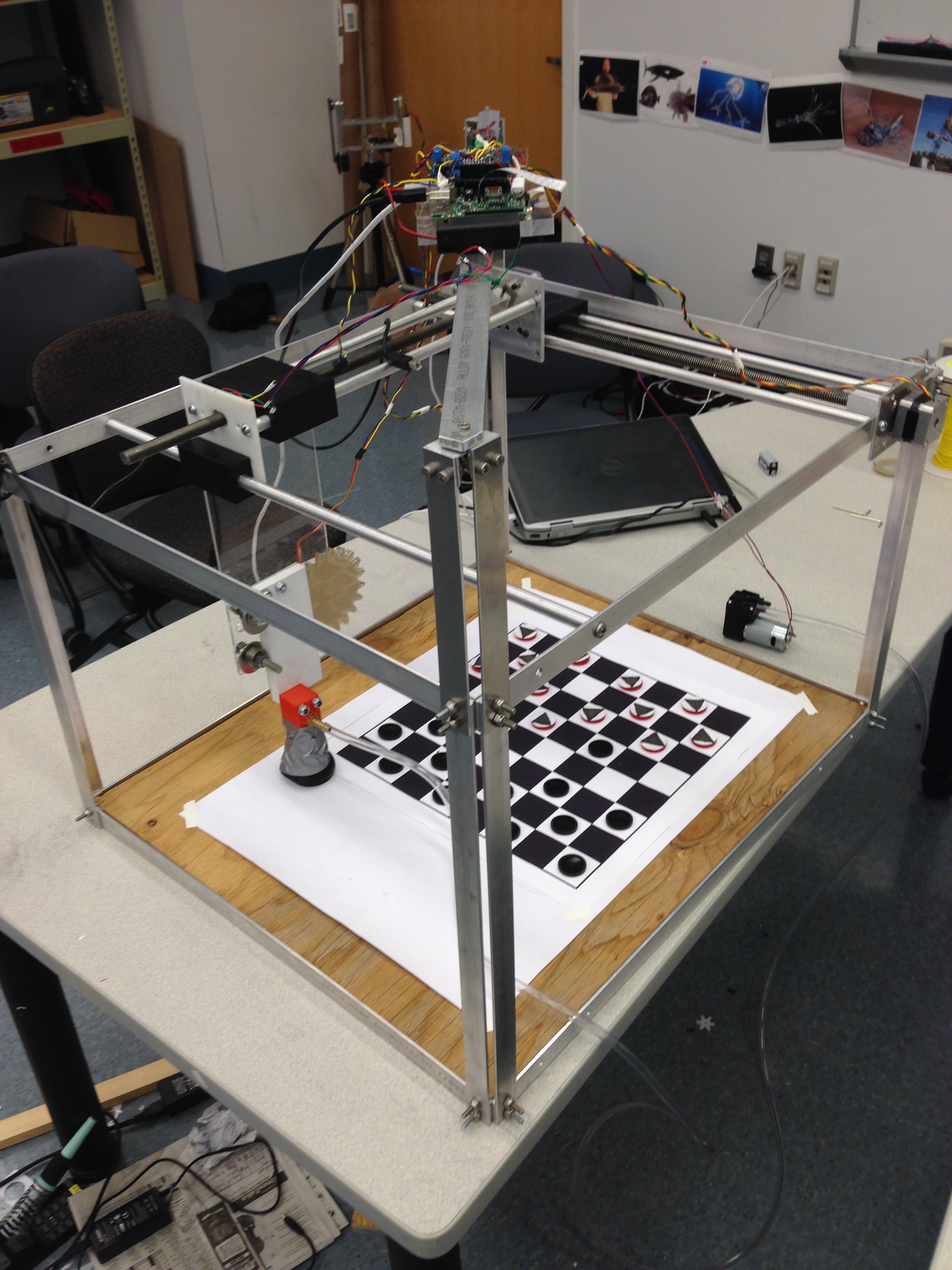
Implementing our design was a challenging procedure as we had to make sure all parts of the designed assembly fit perfectly with each other. Zooming into the mounting of the Pi Camera, we went through several iterations of plywood use, before using aluminum as our final placeholder. An important issue was that of expenses for the designs to become a reality. For further information on the cost of the materials used and the cost of the project as a whole, please click the following button.
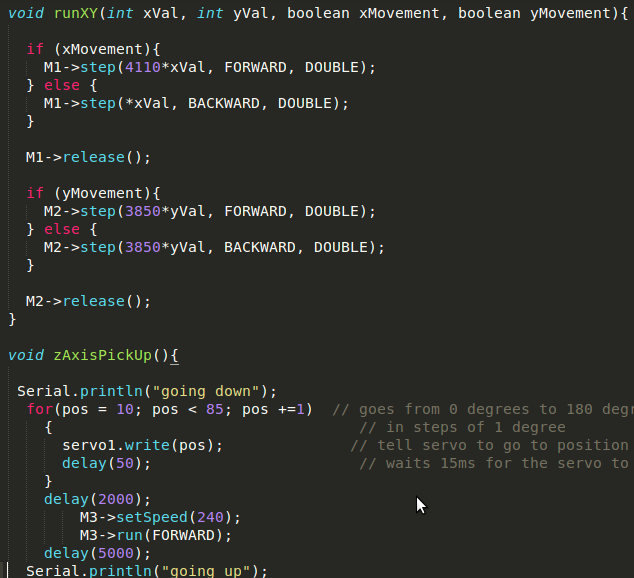
Our electrical system consisted of two bipolar stepper motors, driven by an Adafruit motor shield. Moreover, the z-axis movement was handled by another Adafruit shield that drove a servo and the DC pump of the universal gripper. We programmed the system using an Arduino UNO Microcontroller that interacted with our Raspberry Pi.
Our system consists of a Raspberry Pi running our framework python file, which consists of the gameplay loop with the embedded computer vision, AI program, and serial communications functions in it. The Raspberry Pi is connected to an Arduino UNO, which runs our motor control code, sending signals to two steppers, a servo, and a DC vacuum.