Sparky is an exploration of fish swimming patterns, and the actuation and parameters required to optimize them. Ultimately, Sparky is servo-actuated for vortex-shedding, and coded to swim autonomously at amplitude, phase offset, and frequencies optimized for forward velocity.
 |
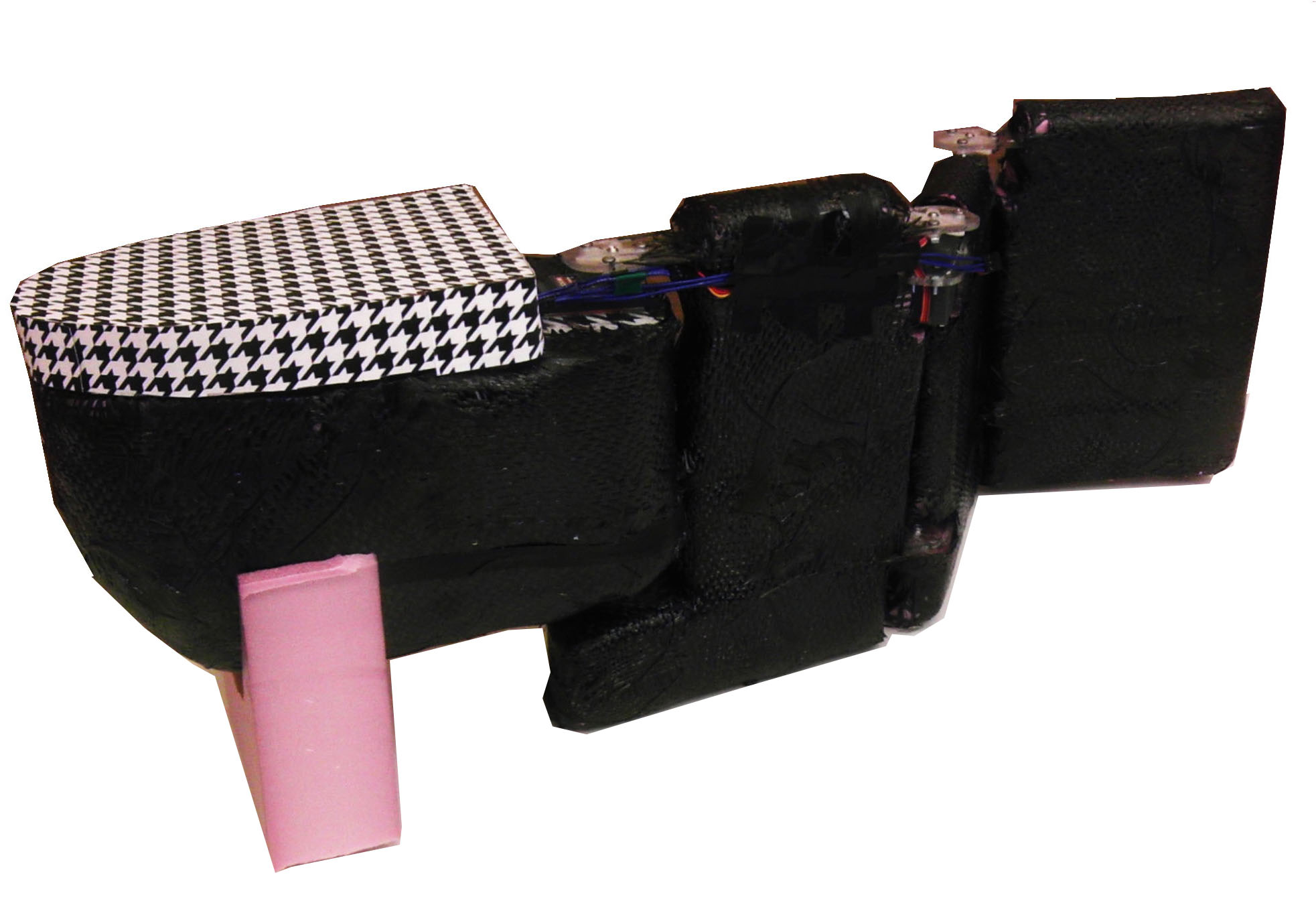
| Sparky is constructed of foam, acrylic, and carbon fiber coating. Foam allowed for flotation and fish-inspired vortex shedding swimming motion, while weighted keels kept everything balanced in water. 3 servo motors directly actuate acrylic spine joints. |
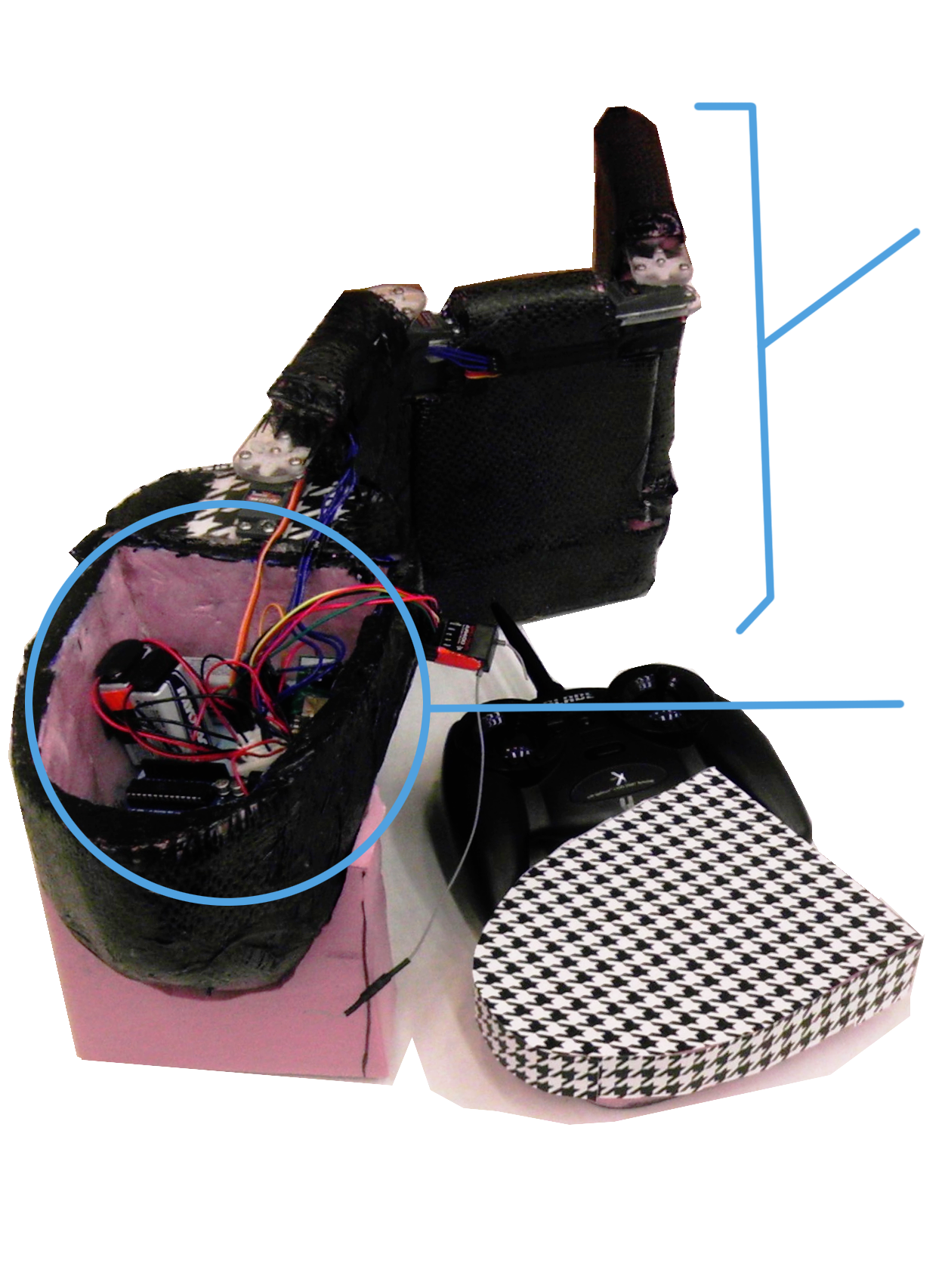
| IR sensors, mounted on the head, allow for obstacle-avoidance and wall-following. Electronics are housed in the hollowed foam head, waterproofed via heat seal, and protected by a splash-proof cap. A LiPo battery powers the servos, Arduino, and IR sensors. XBees interface with a computer for a manual override. |
| An Arduino Mega coordinates servo movement, implementing an optimized gait found using genetic algorithims. |
| The details of our final budget can be found under our "Progression" page. |