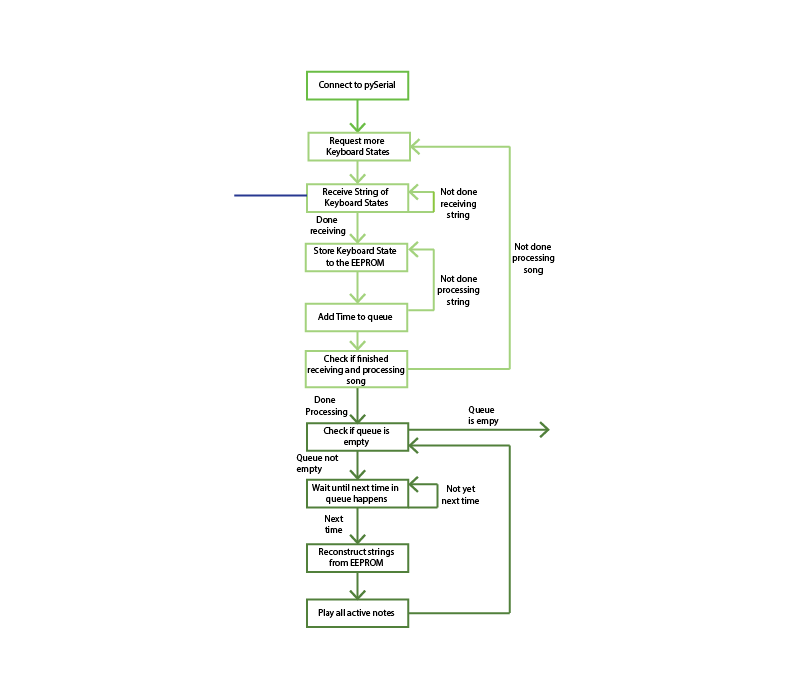
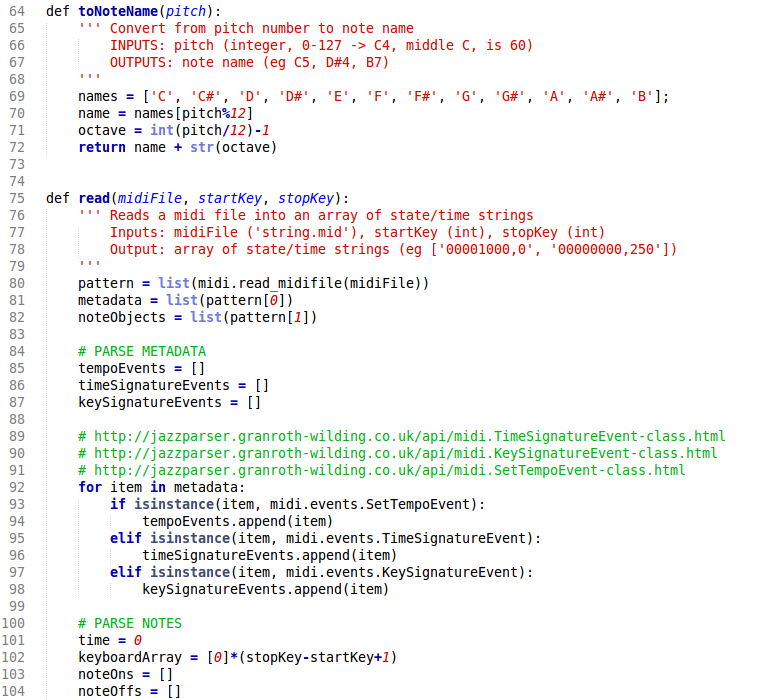
We are able to process note input from either a MIDI file or PDF sheet music and translate it into servo commands. We are able to read music in two ways primarily because we were unsure when scoping our project how long it would take to develop accurate music recognition software. As a result, we started by reading MIDI files, which are simple sequences of different types of events. Having robust music reading early on in the project allowed us to test our electrical and mechanical systems. In parallel, we developed optical music recognition software which finds notes in images of sheet music, identifies their names, characterizes their durations, and constructs a sequence of note events similar to a MIDI file. For a full list of external libraries we used, see the readMe on our Github page.
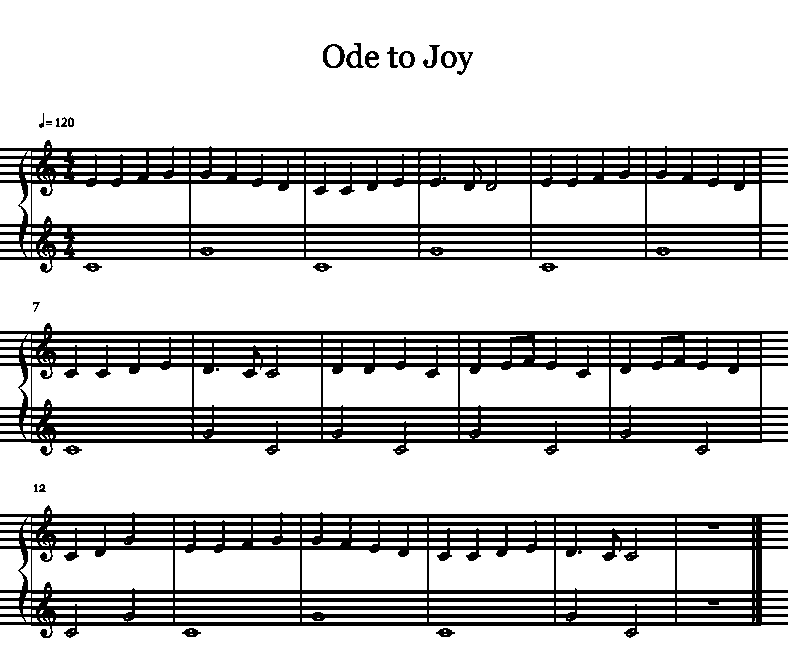
First, we convert a PDF of the sheet music into a PNG image file which OpenCV in Python is capable of reading. Next, we search through the entire image and use the HoughLines algorithm to find and save the y-location of every staff line within the image (shown as the thick horizontal lines to the left)
Next, we split the image into several images, each representing a single line of music. In the process we destroy the staff lines, leaving only the notes behind. Since we saved the staff line locations, we are still able to identify notes.
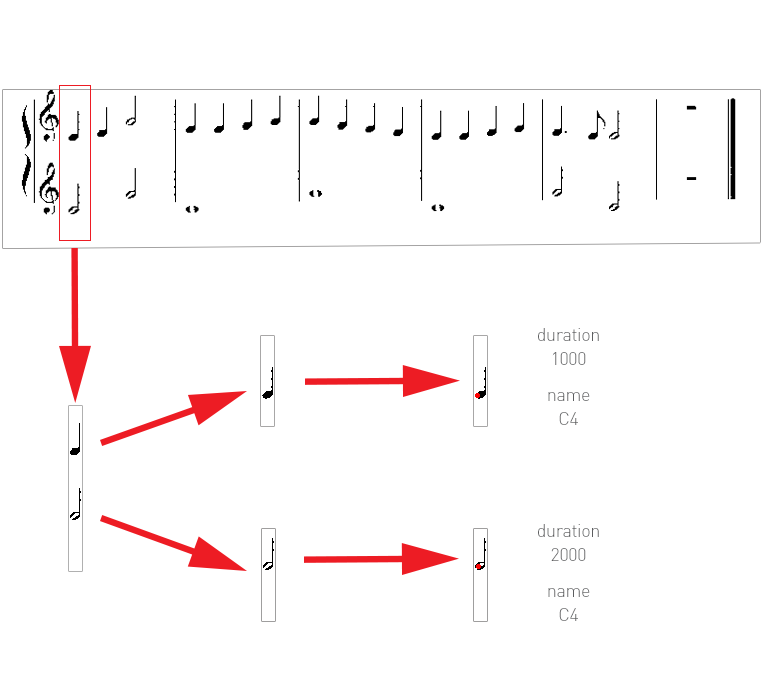
Next, we use a connectivity search to traverse a line of music column by column, checking if it contains any black pixels. We crop out columns that contain black pixels and group them together as note objects.